






 文章详细介绍了如何使用Python代码实现Harris角点检测和SIFT特征提取,并对比了两者在图像处理中的差异。Harris角点检测算法简单但不具尺度不变性,而SIFT算法则提供了尺度不变性和更好的旋转、亮度鲁棒性,适合于图像匹配和识别任务。
文章详细介绍了如何使用Python代码实现Harris角点检测和SIFT特征提取,并对比了两者在图像处理中的差异。Harris角点检测算法简单但不具尺度不变性,而SIFT算法则提供了尺度不变性和更好的旋转、亮度鲁棒性,适合于图像匹配和识别任务。
1.实现Harris角点检测与SIFT特征提取,对比两者的区别
图片处理代码实现:
from PIL import Image
from numpy import *
from scipy.ndimage import filters
from pylab import *
def compute_harris_response(im,sigma=3):
""" 在一幅灰度图像中,对每个像素计算 Harris 角点检测器响应函数 """
# 计算导数
imx = zeros(im.shape)
filters.gaussian_filter(im, (sigma,sigma), (0,1), imx)
imy = zeros(im.shape)
filters.gaussian_filter(im, (sigma,sigma), (1,0), imy)
# 计算 Harris 矩阵的分量
Wxx = filters.gaussian_filter(imx*imx,sigma)
Wxy = filters.gaussian_filter(imx*imy,sigma)
Wyy = filters.gaussian_filter(imy*imy,sigma)
# 计算特征值和迹
Wdet = Wxx*Wyy - Wxy**2
Wtr = Wxx + Wyy
return Wdet / Wtr
def get_harris_points(harrisim,min_dist=10,threshold=0.2):
# 寻找高于阈值的候选角点
corner_threshold = harrisim.max() * threshold
harrisim_t = (harrisim > corner_threshold) * 1
# 得到候选点的坐标
coords = array(harrisim_t.nonzero()).T
# 以及它们的 Harris 响应值
candidate_values = [harrisim[c[0],c[1]] for c in coords]
# 对候选点按照 Harris 响应值进行排序
index = argsort(candidate_values)
# 将可行点的位置保存到数组中
allowed_locations = zeros(harrisim.shape)
allowed_locations[min_dist:-min_dist,min_dist:-min_dist] = 1
# 按照 min_distance 原则,选择最佳 Harris 点
filtered_coords = []
for i in index:
if allowed_locations[coords[i,0],coords[i,1]] == 1:
filtered_coords.append(coords[i])
allowed_locations[(coords[i,0]-min_dist):(coords[i,0]+min_dist),
(coords[i,1]-min_dist):(coords[i,1]+min_dist)] = 0
return filtered_coords
def plot_harris_points(image,filtered_coords):
figure()
gray()
imshow(image)
plot([p[1] for p in filtered_coords],[p[0] for p in filtered_coords],'*')
axis('off')
show()其中 正在get_harris_points 中可以修改阈值
以下是测试的代码:
im = array(Image.open('D:/WXC/ima/outlook.jpg').convert('L'))
harrisim = compute_harris_response(im)
filtered_coords = get_harris_points(harrisim,10)
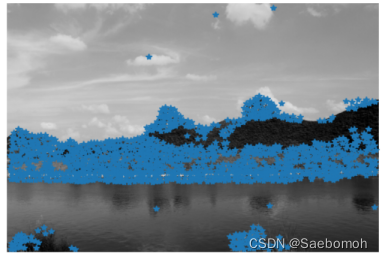
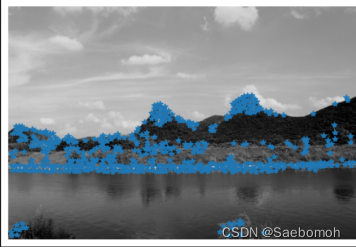
plot_harris_points(im, filtered_coords)实验结果:阈值分别为(0.02,0.06,0.1,0.2)

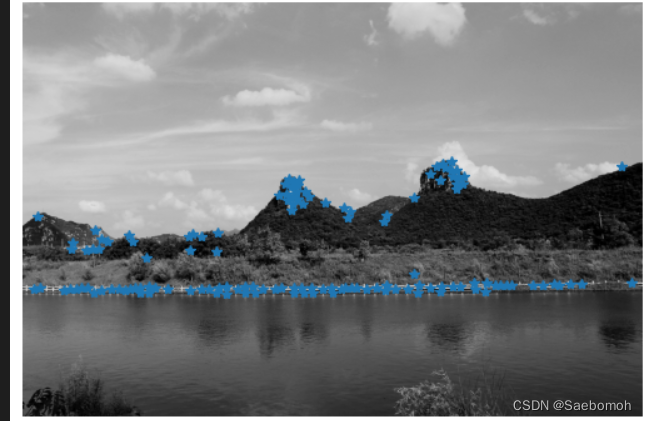
SIFT提取特征值
主函数:
from PIL import Image
from pylab import *
from PCV.localdescriptors import sift
imname = 'outlook.jpg'
im1 = array(Image.open(imname).convert('L'))
sift.process_image(imname,'outlook.sift')
l1,d1 = sift.read_features_from_file('outlook.sift')
figure()
gray()
sift.plot_features(im1,l1,circle=True)
show()然后相关的sift是独立一个包
安装过程:
下载VLFEAT和PCV库,在PCV库中localdescriptors中有sift文件,用记事本打开修改一下
重点是cmmd这地方,把前面的地址改成你下载VLFEAT文件下的sift.exe
(记得先把sift.exe和dll文件复制一份到你的Python项目下)
还有一个就是修改print加个括号,因为之前它版本是2,现在都是3.8左右。
def process_image(imagename,resultname,params="--edge-thresh 10 --peak-thresh 5"):
""" Process an image and save the results in a file. """
if imagename[-3:] != 'pgm':
# create a pgm file
im = Image.open(imagename).convert('L')
im.save('tmp.pgm')
imagename = 'tmp.pgm'
cmmd = str("D:/360安全浏览器下载/vlfeat-0.9.20-bin/vlfeat-0.9.20/bin/win64/sift.exe "+imagename+" --output="+resultname+
" "+params)
os.system(cmmd)
print ('processed', imagename, 'to', resultname)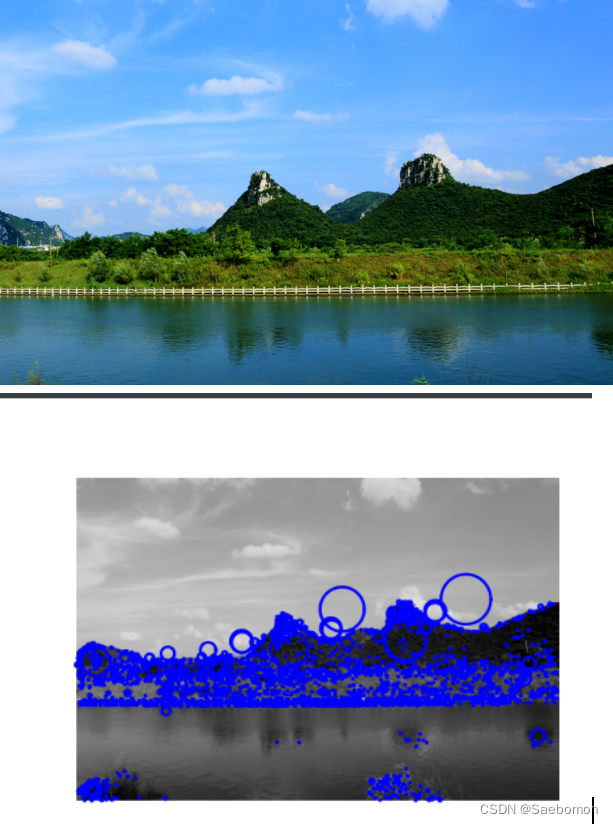
还有一种是cv:

sift.py中相关代码不做解释,课本都有。
区别
用 Harris 算法进行检测,有三点不足:(1)不具有尺度不变性;(2)提取的角点是像素级的;(3)算法检测时间较长,实时应用效果较差。
Harris 算子是一种有效的点特征提取算子,其优点总结起来有: ①计算简单:Harris 算子中只用到灰度的一阶差分以及滤波,操作简单。②提取的点特征均匀而且合理:Harris算子对图像中的每个点都计算其兴趣值,然后在邻域中选择最优点。实验表明,在纹理信息丰富的区域,Harris 算子可以提取出大量有用的特征点,而在纹理信息少的区域,提取的特征点则较少。③稳定:Harris算子的计算公式中只涉及到一阶导数,因此对图像旋转、灰度变化、噪声影响和视点变换不敏感,它也是比较稳定的一种点特征提取算子。
Harris 算子的局限性有:①它对尺度很敏感,不具有尺度不变性。②提取的角点是像素级的。
尺度不变特征变换(Scale-invariantfeature transform),主要特点在于其多尺度信息描述,能够有效描述缩放,并且对 图像旋转、亮度、仿射变换、视角变化具有很好的适应性。
SIFT算法还具有如下一些特点:
1. 信息量丰富,即使少数的几个物体也可以产生大量的SIFT特征向量;
2. 特征区分度大,适用于在海量特征数据库中进行快速、准确的匹配;
3. 速度快,加速的SIFT算法可以达到实时。
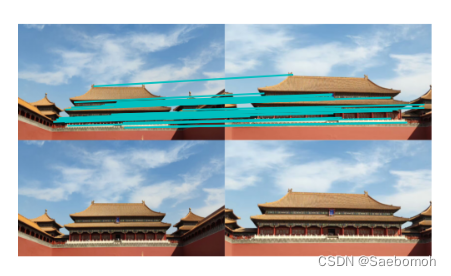
利用SIFT算法实现两幅相近图像的特征匹配
代码:
im1f = 'palace1.png'
im2f = 'palace2.png'
im1 = array(Image.open(im1f))
im2 = array(Image.open(im2f))
sift.process_image(im1f, 'out_sift_1.txt')
l1,d1 = sift.read_features_from_file('out_sift_1.txt')
figure()
gray()
subplot(121)
sift.plot_features(im1, l1, circle=False)
sift.process_image(im2f, 'out_sift_2.txt')
l2,d2 = sift.read_features_from_file('out_sift_2.txt')
subplot(122)
sift.plot_features(im2, l2, circle=False)
matches = sift.match_twosided(d1, d2)
print ( '{} matches'.format(len(matches.nonzero()[0])) )
figure()
gray()
sift.plot_matches(im1,im2,l1,l2,matches, show_below=True)
show()效果:
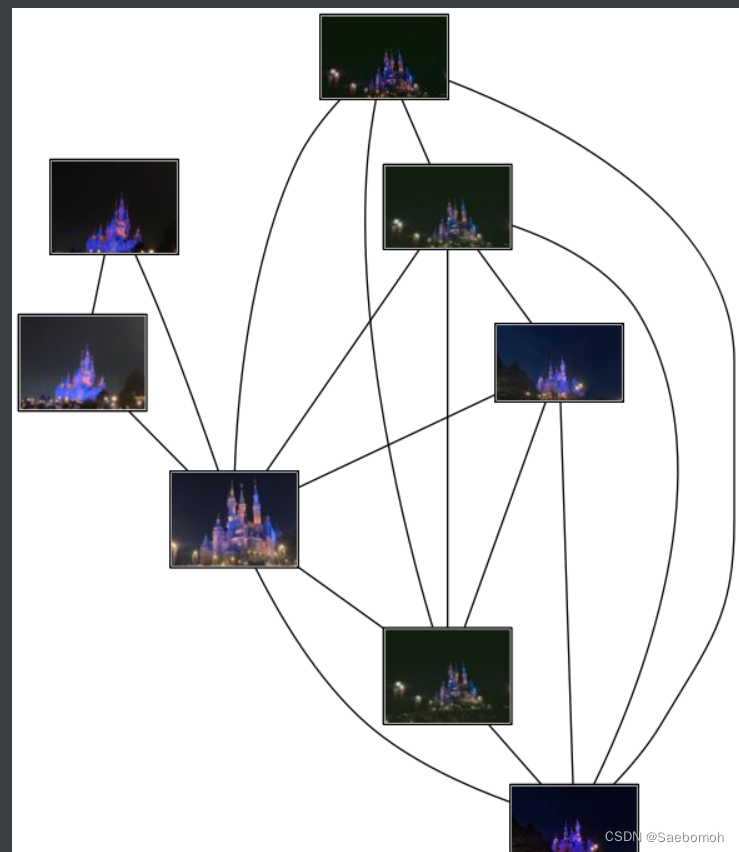
实现匹配地理标记图像
书上代码是长这样的:
import urllib.parse
import urllib.request
import simplejson as json
from urllib import parse
# 查询图像
url ='http://www.panoramio.com/map/get_panoramas.php?order=popularity&\set=public&from=0&to=20&minx=-77.037564&miny=38.896662&\maxx=-77.035564&maxy=38.898662&size=medium'
c = urllib.request.urlopen(url)
# 从 JSON 中获得每个图像的 url
j = json.loads(c.read())
imurls = []
for im in j['photos']:
imurls.append(im['photo_file_url'])
for url in imurls:
image = urllib.request.URLopener()
image.retrieve(url, os.path.basename(urllib.parse.urlparse(url).path))
print ('downloading:', url)但是根本下载不下来,因为是外网所以一直响应失败,因此需要自行寻找图片存储然后运行。
from pylab import *
from PIL import Image
from PCV.localdescriptors import sift
from PCV.tools import imtools
import pydot
download_path = r"D:/WXC/WEBK/img"
path = r"D:/WXC/WEBK/imgsave"
imlist = imtools.get_imlist(download_path)
nbr_images = len(imlist)
featlist = [imname[:-3] + 'sift' for imname in imlist]
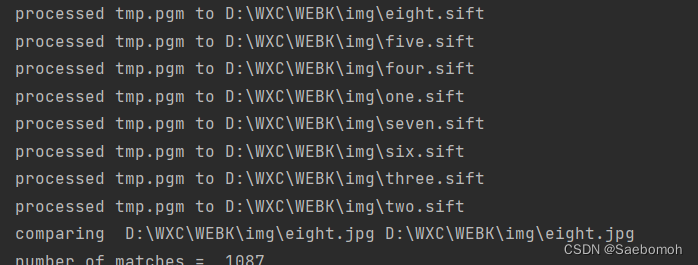
for i, imname in enumerate(imlist):
sift.process_image(imname, featlist[i])
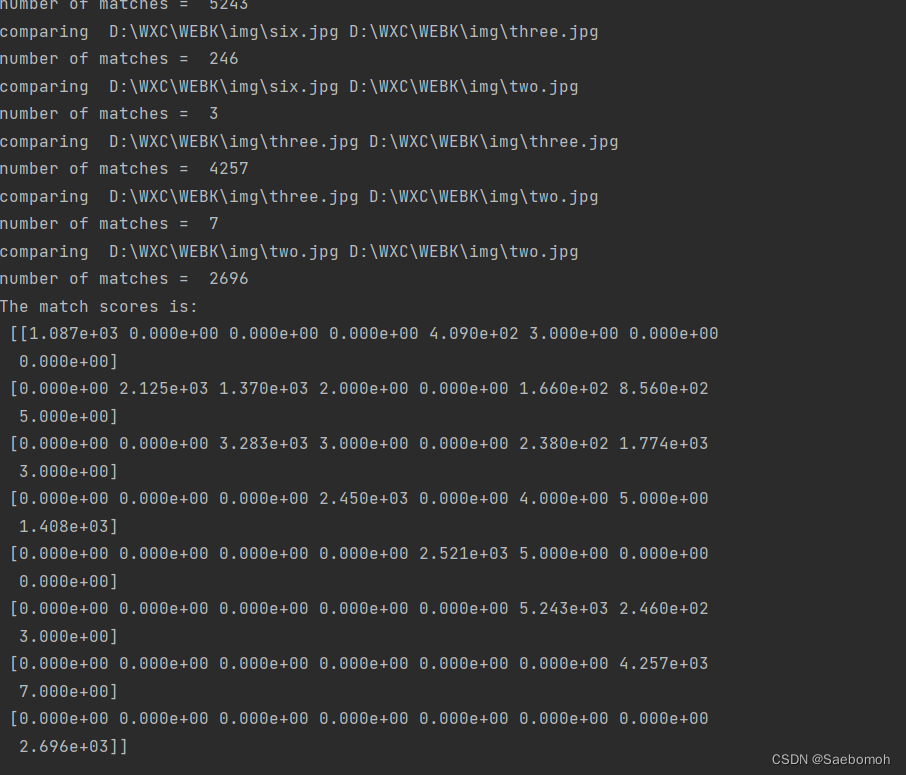
matchscores = zeros((nbr_images, nbr_images))
for i in range(nbr_images):
for j in range(i, nbr_images): # only compute upper triangle
print('comparing ', imlist[i], imlist[j])
l1, d1 = sift.read_features_from_file(featlist[i])
l2, d2 = sift.read_features_from_file(featlist[j])
matches = sift.match_twosided(d1, d2)
nbr_matches = sum(matches > 0)
print('number of matches = ', nbr_matches)
matchscores[i, j] = nbr_matches
print("The match scores is: \n", matchscores)
for i in range(nbr_images):
for j in range(i + 1, nbr_images): # no need to copy diagonal
matchscores[j, i] = matchscores[i, j]
threshold = 2 # min number of matches needed to create link
g = pydot.Dot(graph_type='graph') # don't want the default directed graph
for i in range(nbr_images):
for j in range(i + 1, nbr_images):
if matchscores[i, j] > threshold:
# first image in pair
im = Image.open(imlist[i])
im.thumbnail((100, 100))
filename = path + str(i) + '.jpg'
im.save(filename) # need temporary files of the right size
g.add_node(pydot.Node(str(i), fontcolor='transparent', shape='rectangle', image=filename))
# second image in pair
im = Image.open(imlist[j])
im.thumbnail((100, 100))
filename = path + str(j) + '.jpg'
im.save(filename) # need temporary files of the right size
g.add_node(pydot.Node(str(j), fontcolor='transparent', shape='rectangle', image=filename))
g.add_edge(pydot.Edge(str(i), str(j)))
g.write_png('Disneyland.jpg')


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









