






 本文深入探讨了一阶段(One-stage)和两阶段(Two-stage)目标检测算法的区别。两阶段算法如Faster R-CNN,先生成候选区域再进行分类和定位,精度高但速度较慢。而一阶段算法如YOLO,直接预测物体类别和边界框,速度快但可能牺牲部分准确性。这两种方法各有优劣,适用于不同的应用场景。
本文深入探讨了一阶段(One-stage)和两阶段(Two-stage)目标检测算法的区别。两阶段算法如Faster R-CNN,先生成候选区域再进行分类和定位,精度高但速度较慢。而一阶段算法如YOLO,直接预测物体类别和边界框,速度快但可能牺牲部分准确性。这两种方法各有优劣,适用于不同的应用场景。
one stage 与two stage 解释
Two stage:首先产生候选区域(region proposals),然后利用卷积神经网络对候选区域分类(一般还需要对位置精修)
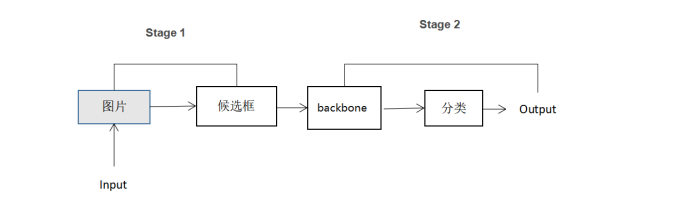
stage 1:从图像中生成regional proposal(物体备选框,本质上是对物体边框的初步猜想)
Stage 2:从regional proposal 中生成最终的物体边框。
典型的backbone有VGGNet、ResNet。
网络的准确度高、速度相对One-stage慢。
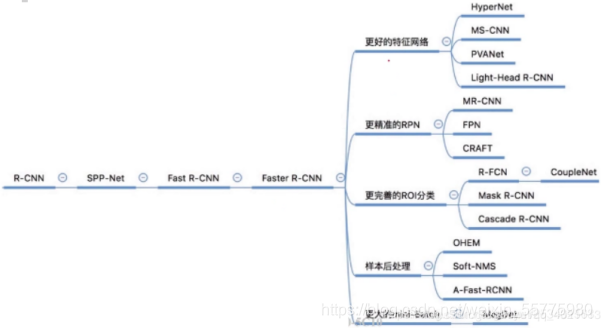
经典算法:
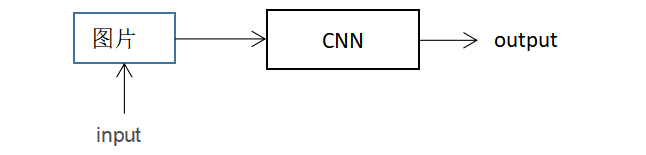
One stage:其不需要region proposal阶段,直接产生物体的类别概率和位置坐标值,经过单次检测即可直接得到最终的检测结果,因此有着更快的检测速度。
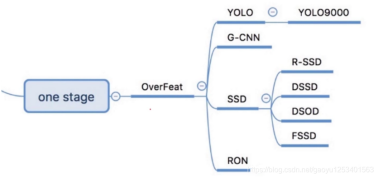
经典算法:

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









