







 本文深入探讨人形机器人动力核心——空心杯电机,阐述其在灵巧手中的应用和优势,包括无铁芯设计带来的高效率、低损耗特性,并对比有刷与无刷电机。报告还提及特斯拉Optimus机器人所采用的电机技术,以及编码器在精准控制中的作用。
本文深入探讨人形机器人动力核心——空心杯电机,阐述其在灵巧手中的应用和优势,包括无铁芯设计带来的高效率、低损耗特性,并对比有刷与无刷电机。报告还提及特斯拉Optimus机器人所采用的电机技术,以及编码器在精准控制中的作用。
今天分享的是人形机器人系列深度研究报告:《人形机器人行业报告:人形机器人的动力核心电机》。
(报告出品方:光大证券)
报告共计:35页
电机:人形机器人的动力核心
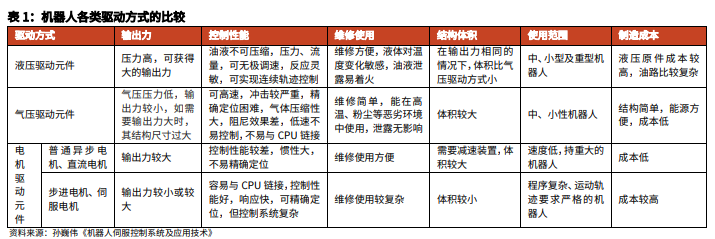
人形机器人各类驱动方式的比较
电机是人形机器人中动力的产生机构,可以类比做人的肌肉。机器人的驱动方式可以分为电动驱动、液压驱动、气压驱动;其中,电动驱动由于效率高、精确度高、成本低等优势,得以广泛应用。
空心杯电机和无框力矩电机适配机器人不同部位
人形机器人灵巧手使用的电机是空心杯电机。特斯拉人形机器人从 2021 年 Tesla Bot 到 2022 年 Al Day Optimus 正式亮相,再到 2023 年 Optimus 二代, 已经实现快速发展。Optimus 的灵巧手采用经典的 6 电机驱动方案,即由空心 杯电机+驱动器+减速器+编码器组成,拇指是采用双电机驱动弯曲和侧摆,其余 四指各用一个电机带动;国内领先的机器人厂商因时机器人的仿人五指灵巧手采用直线驱动设计,内部集成了 6 个力控微型伺服电缸,即减速器、空心杯电机、 丝杆机构、传感器以及伺服控制系统。

人形机器人关节使用的电机是无框力矩电机。特斯拉人形机器人全身共有 28 个 执行器,执行器分布在肩部 6 个、肘部 2 个、腕部 6 个、躯干 2 个、髋部 6 个、 膝部 2 个、踝部 4 个,其中旋转执行器和线性执行器各 14 个。
空心杯电机:与灵巧手高度适配
无铁芯结构,能效高、转速快、寿命长
空心杯电机是一种微型伺服电动机,与灵巧手关节高度适配。它可以利用永磁铁 产生磁场,从而实现直流供电。与传统电机的不同之处在于,空心杯电机结构为转子无铁芯,表现为无铁心损耗、低摩擦和良好的散热性
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









