







Altas读写分离
一、什么是Atlas读写分离?
Atlas的端口是多少?
Atlas 端口:33060
admin 端口: 2345
1.画图说明
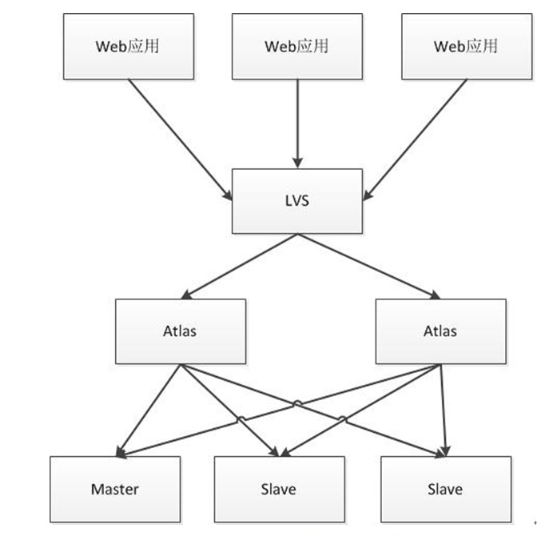
2.文字说明
Atlas是由 Qihoo 360, Web平台部基础架构团队开发维护的一个基于MySQL协议的数据中间层项目。
它是在mysql-proxy 0.8.2版本的基础上,对其进行了优化,增加了一些新的功能特性。
360内部使用Atlas运行的mysql业务,每天承载的读写请求数达几十亿条。
下载地址
https://github.com/Qihoo360/Atlas/releases
注意:
1、Atlas只能安装运行在64位的系统上
2、Centos 5.X安装 Atlas-XX.el5.x86_64.rpm,Centos 6.X安装Atlas-XX.el6.x86_64.rpm。
3、后端mysql版本应大于5.1,建议使用Mysql 5.6以上
二、Atlas如何安装及配置?
--安装
yum install -y Atlas-static atlas atlas-sse3 atlas-sse2 atals-devel
--配置
cd /usr/local/mysql-proxy/conf
mv test.cnf test.cnf.bak
vi test.cnf
[mysql-proxy]
admin-username = user
admin-password = pwd
proxy-backend-addresses = 10.0.0.55:3306
proxy-read-only-backend-addresses = 10.0.0.51:3306,10.0.0.53:3306
pwds = repl:3yb5jEku5h4=,mha:O2jBXONX098=
daemon = true
keepalive = true
event-threads = 8
log-level = message
log-path = /usr/local/mysql-proxy/log
sql-log=ON
proxy-address = 0.0.0.0:33060
admin-address = 0.0.0.0:2345
charset=utf8
--启动atlas
/usr/local/mysql-proxy/bin/mysql-proxyd test start
ps -ef |grep proxy
1. Atlas功能测试
--测试读操作:
mysql -umha -pmha -h 10.0.0.53 -P 33060
db03 [(none)]>select @@server_id;
--测试写操作:
mysql> begin;select @@server_id;commit;
2. 生产用户要求
开发人员申请一个应用用户 app( select update insert) 密码123456,要通过10网段登录
1. 在主库中,创建用户
grant select ,update,insert on *.* to app@'10.0.0.%' identified by '123456';
2. 在atlas中添加生产用户
/usr/local/mysql-proxy/bin/encrypt 123456 ---->制作加密密码
vim test.cnf
pwds = repl:3yb5jEku5h4=,mha:O2jBXONX098=,app:/iZxz+0GRoA=
/usr/local/mysql-proxy/bin/mysql-proxyd test restart
[root@db03 conf]# mysql -uapp -p123456 -h 10.0.0.53 -P 33060
三、 Atlas基本管理
1.连接查看管理帮助
mysql -uuser -ppwd -h127.0.0.1 -P2345
2.管理命令
1)查看帮助:
mysql> select * from help;
2)查看数据库节点状态
mysql> SELECT * FROM backends ;
+-------------+----------------+-------+------+
| backend_ndx | address | state | type |
+-------------+----------------+-------+------+
| 1 | 10.0.0.55:3306 | up | rw |
| 2 | 10.0.0.51:3306 | up | ro |
| 3 | 10.0.0.53:3306 | up | ro |
+-------------+----------------+-------+------+
3 rows in set (0.00 sec)
3)上线或下线节点
SET OFFLINE $backend_id
SET ONLINE $backend_id
4)添加删除节点
ADD MASTER $backend
ADD SLAVE $backend
REMOVE BACKEND $backend_id
--例子:
先删除REMOVE BACKEND 3;
再添加ADD SLAVE 10.0.0.53:3306;
***注意:这里所有的操作都是临时性的
5)保存配置到配置文件
SAVE CONFIG;
3.用户管理
SELECT * FROM pwds
ADD PWD $pwd
ADD ENPWD $PWD
REMOVE PWD $pwd
4.企业用户管理
1)数据库主节点
grant all on *.* to hhh@'10.0.0.%' identified by '123';
2)Atlas中添加数据库用户
--明文
ADD PWD hhh:123;
--密文
/usr/local/mysql-proxy/bin/encrypt 123
3yb5jEku5h4=
ADD ENPWD hhh=
3)配置永久生效
SAVE CONFIG;
6. 自动分表介绍
使用Atlas的分表功能时,首先需要在配置文件test.cnf设置tables参数。
tables参数设置格式:数据库名.表名.分表字段.子表数量,
比如:
你的数据库名叫school,表名叫stu,分表字段叫id,总共分为2张表,那么就写为school.stu.id.2,如果还有其他的分表,以逗号分隔即可。
7. 关于读写分离建议
MySQL-Router ---> MySQL官方
ProxySQL --->Percona
Maxscale ---> MariaDB


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









