






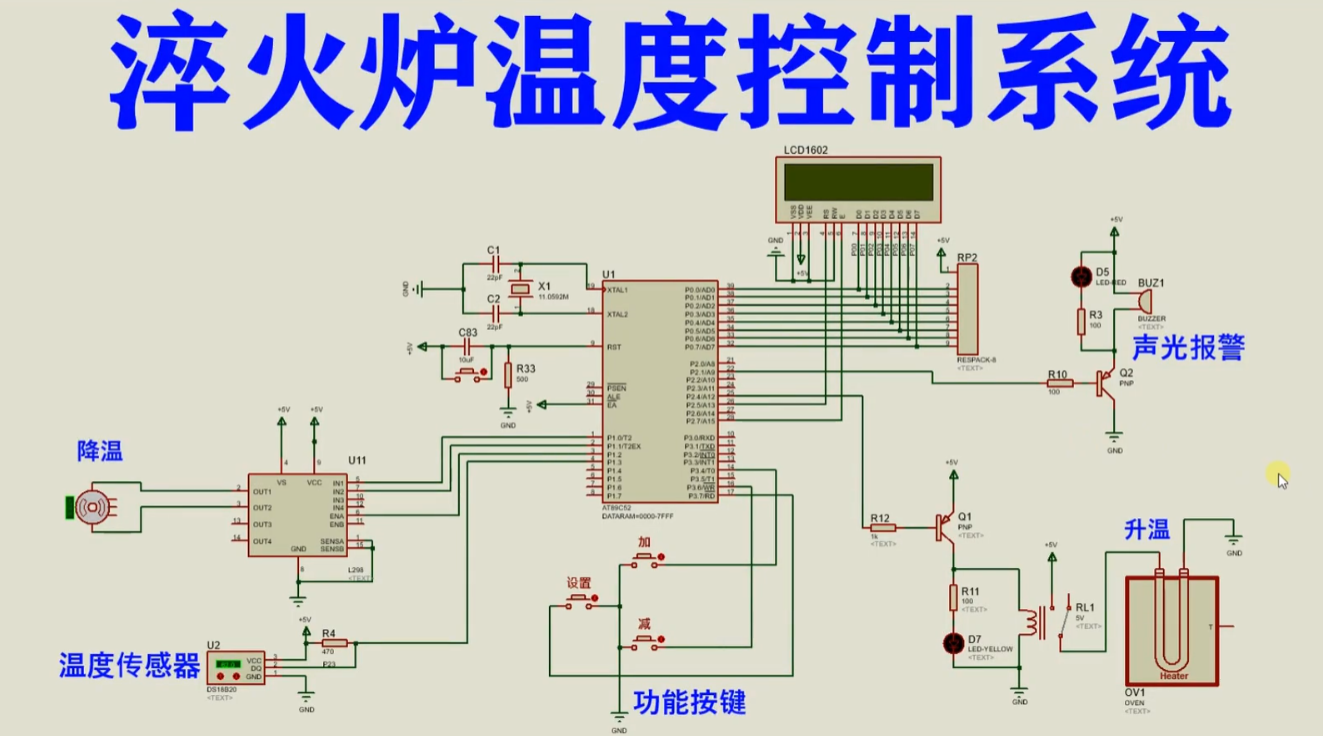
仿真图:
芯片/模块的特点:
AT89C52简介:
AT89C52是一款经典的8位单片机,是意法半导体(STMicroelectronics)公司生产的一系列单片机之一。它基于8051内核,并具有许多与其兼容的特性。
AT89C52的主要特点如下:
内部存储器:AT89C52具有8KB的闪存(Flash)存储器,可用于存储用户程序和数据。这些存储器的内容可以通过编程器进行编程和擦除。
RAM存储器:AT89C52配备了256字节的随机存取存储器(RAM),用于暂存数据和程序的变量。
外部扩展性:AT89C52支持多种外部扩展设备的连接,包括外部存储器(如RAM、EEPROM)和外设(如ADC、LCD、UART等),通过外部硬件连接,可以扩展单片机的功能和应用。
通用I/O引脚:AT89C52拥有32个可编程的通用输入/输出引脚,可用于连接外部设备和与其他芯片进行通信。
定时器/计数器:AT89C52内置了3个16位定时器/计数器和一个可编程的串行定时器/计数器。这些计时器/计数器可用于实现定时功能、生成脉冲信号、测量时间间隔等。0
串行通信:AT89C52支持串行通信接口,包括UART(串行异步通信)和SPI(串行外设接口),便于与其他设备进行数据通信和交互。
低功耗模式:AT89C52具有多种低功耗模式,如空闲模式和电源下模式,在不需要执行任务的时候可以将CPU进入低功耗状态以节省能量。
宽电源电压范围:AT89C52的工作电压范围通常为4.0V至5.5V,可以满足大多数应用需求。
主程序:
//#include <reg51.h>
#include<stc15.h>
#include"intrins.h"
#define uint unsigned int
#define uchar unsigned char //宏定义
#define LCD1602 P0
sbit SET=P3^7; //定义调整键
sbit DEC=P3^6; //定义减少键
sbit ADD=P3^4; //定义增加键
sbit BUZZ=P2^1; //定义蜂鸣器
sbit ALAM=P2^4; //定义加热模块
sbit DQ=P1^3; //定义DS18B20总线I/O
sbit RS = P2^5;
sbit EN = P2^7;
bit shanshuo_st; //闪烁间隔标志
bit beep_st; //蜂鸣器间隔标志
uchar x=0; //计数器
//motor
sbit IN1 = P1^0;
sbit IN2 = P1^1;
sbit PWM = P1^2;
uint t = 46082;
uchar code tab1[]={"Now Tem: . C "};
uchar code tab2[]={"TH: C TL: C"};
uint c;
uchar Mode=0; //状态标志
signed char TH=65; //上限报警温度,默认值为60
signed char TL=60; //下限报警温度,默认值为60
//============================================================================================
//====================================DS18B20=================================================
//============================================================================================
void delay_ms(uchar t)
{
uchar x,y;
for(x = t;x > 0;x--)
for(y = 110;y > 0;y--);
}
void Timer0_Init()
{
TMOD = 0X01;
TH0 = (65536 - 46082)/256;
TL0 = (65536 - 46082)%256;
EA = 1 ;
ET0 = 1;
TR0 = 1;
}
void Positive_Rotation()
{
IN1 = 0;
IN2 = 1;
}
void Reverse_Rotation()
{
IN1 = 1;
IN2 = 0;
}
void Stop_Rotation()
{
IN1 = 1;
IN2 = 1;
}
/*****延时子程序*****/
void Delay_DS18B20(int num)
{
while(num--) ;
}
void delay(uint xms)//延时函数,有参函数
{
unsigned char i, j;
_nop_();
_nop_();
_nop_();
i = 11;
j = 190;
do
{
while (--j);
} while (--i);
}
/*****初始化DS18B20*****/
void Init_DS18B20(void)
{
unsigned char x=0;
DQ = 1; //DQ复位
Delay_DS18B20(8); //稍做延时
DQ = 0; //单片机将DQ拉低
Delay_DS18B20(80); //精确延时,大于480us
DQ = 1; //拉高总线
Delay_DS18B20(14);
x = DQ; //稍做延时后,如果x=0则初始化成功,x=1则初始化失败
Delay_DS18B20(20);
}
/*****读一个字节*****/
unsigned char ReadOneChar(void)
{
unsigned char i=0;
unsigned char dat = 0;
for (i=8;i>0;i--)
{
DQ = 0; // 给脉冲信号
dat>>=1;
DQ = 1; // 给脉冲信号
if(DQ)
dat|=0x80;
Delay_DS18B20(4);
}
return(dat);
}
/*****写一个字节*****/
void WriteOneChar(unsigned char dat)
{
unsigned char i=0;
for (i=8; i>0; i--)
{
DQ = 0;
DQ = dat&0x01;
Delay_DS18B20(5);
DQ = 1;
dat>>=1;
}
}
/*****读取温度*****/
unsigned int ReadTemperature(void)
{
unsigned char a=0;
unsigned char b=0;
unsigned int t=0;
float tt=0;
Init_DS18B20();
WriteOneChar(0xCC); //跳过读序号列号的操作
WriteOneChar(0x44); //启动温度转换
Init_DS18B20();
WriteOneChar(0xCC); //跳过读序号列号的操作
WriteOneChar(0xBE); //读取温度寄存器
a=ReadOneChar(); //读低8位
b=ReadOneChar(); //读高8位
t=b;
t<<=8;
t=t|a;
tt=t*0.0625;
// t= tt*10+0.5; //放大10倍输出并四舍五入
t= tt*10+5;
return(t);
}
/*****读取温度*****/
void check_wendu(void)
{
c=ReadTemperature()-5; //获取温度值并减去DS18B20的温漂误差
if(c>1200)
c=1200;
}
/********液晶写入指令函数与写入数据函数,以后可调用**************/
void write_1602com(uchar com)//****液晶写入指令函数****
{
RS=0;//数据/指令选择置为指令
// rw=0; //读写选择置为写
LCD1602=com;//送入数据
delay(1);
EN=1;//拉高使能端,为制造有效的下降沿做准备
delay(1);
EN=0;//en由高变低,产生下降沿,液晶执行命令
}
void write_1602dat(uchar dat)//***液晶写入数据函数****
{
RS=1;//数据/指令选择置为数据
// rw=0; //读写选择置为写
LCD1602=dat;//送入数据
delay(1);
EN=1; //en置高电平,为制造下降沿做准备
delay(1);
EN=0; //en由高变低,产生下降沿,液晶执行命令
}
void lcd_init()//***液晶初始化函数****
{
uchar a;
write_1602com(0x38);//设置液晶工作模式,意思:16*2行显示,5*7点阵,8位数据
write_1602com(0x0c);//开显示不显示光标
write_1602com(0x06);//整屏不移动,光标自动右移
write_1602com(0x01);//清显示
write_1602com(0x80);//日历显示固定符号从第一行第1个位置之后开始显示
for(a=0;a<16;a++)
{
write_1602dat(tab1[a]);//向液晶屏写日历显示的固定符号部分
delay(3);
}
write_1602com(0x80+0x40);//时间显示固定符号写入位置,从第2个位置后开始显示
for(a=0;a<16;a++)
{
write_1602dat(tab2[a]);//写显示时间固定符号,两个冒号
delay(3);
}
}
void display()
{
if(Mode==0)
{
write_1602com(0x80+8);
write_1602dat(c/1000+0x30);
write_1602dat((c%1000)/100+0x30);
write_1602dat(((c%1000)%100)/10+0x30);
write_1602com(0x80+12);
write_1602dat(((c%1000)%100)%10+0x30);
write_1602com(0x80+13);
write_1602dat(0xdf);
write_1602com(0x80+0x40+3);
write_1602dat(TH/10+0x30);
write_1602dat(TH%10+0x30);
write_1602dat(0xdf);
write_1602com(0x80+0x40+12);
write_1602dat(TL/10+0x30);
write_1602dat(TL%10+0x30);
write_1602dat(0xdf);
}
}
//=====================================================================================
/*****初始化定时器0*****/
void InitTimer(void)
{ AUXR = 0x40; //定时器1为1T模式
TMOD=0x1;
TH0=0x3c;
TL0=0xb0; //50ms(晶振12M)
EA=1; //全局中断开关
TR0=1;
ET0=1; //开启定时器0
}
void KEY()
{
//功能键
if(SET==0)
{
BUZZ=0;
delay(10);
if(SET==0)
{
Mode++;
if(Mode==3)
Mode=0;
BUZZ=1;
}
while(SET==0)
{
if(Mode==0)
{
// write_1602com(0x80+0x40+6);
write_1602com(0x0c);
}
else if(Mode==1)
{
write_1602com(0x80+0x40+4);
write_1602com(0x0f);
}
else
{
write_1602com(0x80+0x40+13);
write_1602com(0x0f);
}
}
}
//增加
if(ADD==0&&Mode==1)
{
BUZZ=0;
delay(10);
if(ADD==0)
{
TH++;
if(TH>=99)
TH=99;
write_1602com(0x80+0x40+3);
write_1602dat(TH/10+0x30);
write_1602dat(TH%10+0x30);
write_1602com(0x80+0x40+4);
BUZZ=1;
}
while(ADD==0);
}
//减少
if(DEC==0&&Mode==1)
{
BUZZ=0;
delay(10);
if(DEC==0)
{
TH--;
if(TH==TL)
TH=TL+1;
write_1602com(0x80+0x40+3);
write_1602dat(TH/10+0x30);
write_1602dat(TH%10+0x30);
write_1602com(0x80+0x40+4);
BUZZ=1;
}
while(DEC==0);
}
if(ADD==0&&Mode==2)
{
BUZZ=0;
delay(10);
if(ADD==0)
{
TL++;
if(TL==TH)
TL=TH-1;
write_1602com(0x80+0x40+12);
write_1602dat(TL/10+0x30);
write_1602dat(TL%10+0x30);
write_1602com(0x80+0x40+13);
BUZZ=1;
}
while(ADD==0);
}
//减少
if(DEC==0&&Mode==2)
{
BUZZ=0;
delay(10);
if(DEC==0)
{
TL--;
if(TL<=0)
TL=0;
write_1602com(0x80+0x40+12);
write_1602dat(TL/10+0x30);
write_1602dat(TL%10+0x30);
write_1602com(0x80+0x40+13);
BUZZ=1;
}
while(DEC==0);
}
}
/*****报警子程序*****/
void Alarm()
{
if(x>=10){beep_st=~beep_st;x=0;}
if(Mode==0)
{
if((c/10)>=TH)
{
ALAM=1;
Positive_Rotation();
if(beep_st==1)
BUZZ=0;
else
BUZZ=1;
}
else if((c/10)<TL)
{
Stop_Rotation();
ALAM=0;
if(beep_st==1)
BUZZ=0;
else
BUZZ=1;
}
else
{
BUZZ=1;
ALAM=1;
Stop_Rotation();
}
}
else
{
BUZZ=1;
ALAM=1;
Stop_Rotation();
}
}
/*****主函数*****/
void main(void)
{
uint z;
delay(1);
lcd_init();
delay(1);
InitTimer(); //初始化定时器
for(z=0;z<100;z++)
{
check_wendu();
delay(1);
}
while(1)
{
display();
KEY();
Alarm();
check_wendu();
}
}
设计文件:

















 2662
2662

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









