







(搬运了很多博主写的文章,如有侵权立删并表示抱歉!)
鱼眼镜头的成像原理到畸变矫正(完整版)_鱼眼畸变-优快云博客
1.针孔相机畸变模型
1.1 径向畸变
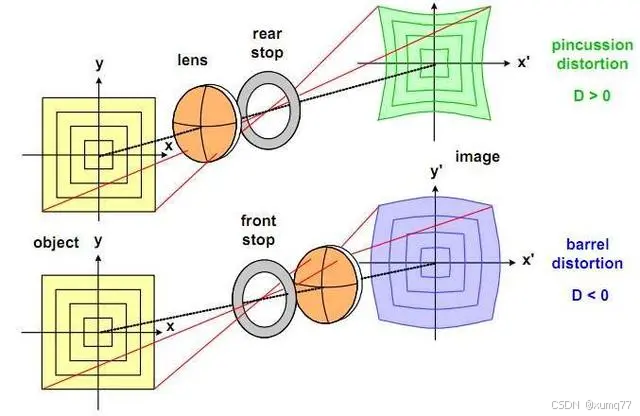
在相机制造过程中,很难保证镜头的厚度完全均匀,由于制造工艺的原因,通常这种情况为中间厚、边缘薄,因而光线在远离透镜中心的地方,会发生更大程序的扭曲。径向畸变是沿着透镜半径方向分布的畸变,光线在原理透镜中心的地方比靠近中心的地方更加弯曲,光线离主轴越远,畸变越大。包括枕形畸变和桶形畸变。
 包括
包括
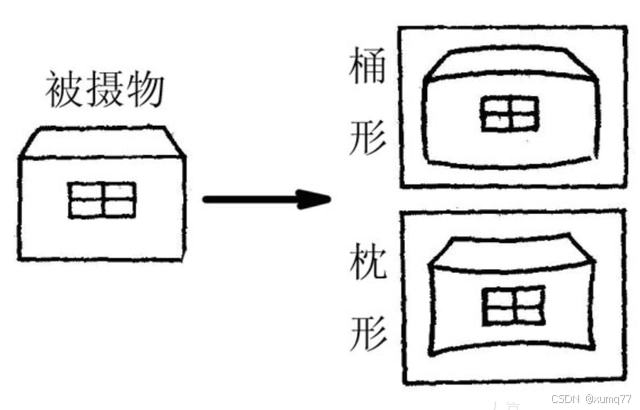
广角镜头变形效果是桶形畸变,长焦镜头变形效果是枕形畸变。
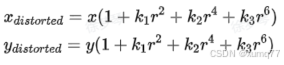
实际情况中我们常用 r = 0处的泰勒级数展开的前几项来近似描述径向畸变。
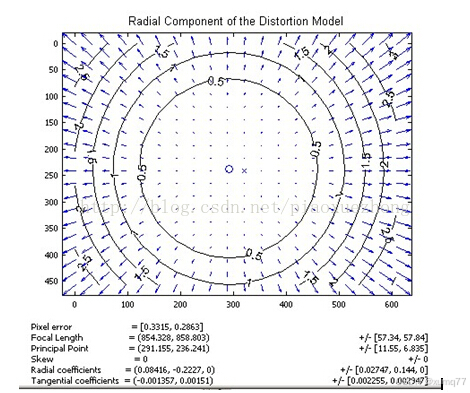
下图表示是光心不同距离的点经过透镜径向畸变后的便宜示意图,距离光心越远,径向畸变唯一越大,在光心附件几乎没有偏移。
通常只用k1、k2来矫正相机,k1对于畸变较小的图像中心区域有很大的作用和影响;
对于畸变较大的图像边缘区域,主要是k2在起作用,k3一般用于广角相机,鱼眼相机。
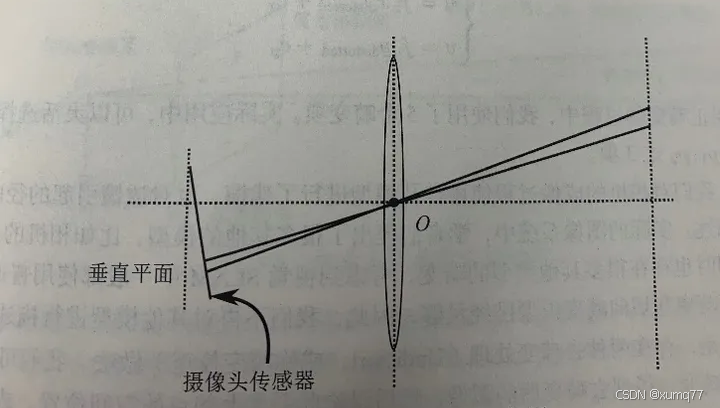
1.2 切向畸变
在相机制造过程中,成像平面与透镜平面不平行,产生切向畸变。

1.3 总畸变模型
综上,

一般用K1,K2,K3,P1,P2五个参数来描述针孔模型的畸变。





















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









