






#include "tim\bsp_tim.h"
TIM_HandleTypeDef htim2;
TIM_HandleTypeDef htim3;
TIM_HandleTypeDef htim6;
TIM_HandleTypeDef htim15;
TIM_HandleTypeDef htim16;
TIM_HandleTypeDef htim17;
/* TIM2 init function 输入捕获PWM占空比和周期
从模式复位Reset模式:使用内部时钟作为时钟源,TI1/2外部有效信号复位计数器。
例如,CH1触发输入上升沿有效时,计数器复位到默认值0。
*/
void InputPWM_TIM2_Init(void){
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_SlaveConfigTypeDef sSlaveConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_IC_InitTypeDef sConfigIC = {0};
htim2.Instance = TIM2;
htim2.Init.Prescaler = 80-1;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 65535;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_IC_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sSlaveConfig.SlaveMode = TIM_SLAVEMODE_RESET;
sSlaveConfig.InputTrigger = TIM_TS_TI1FP1;
sSlaveConfig.TriggerPolarity = TIM_INPUTCHANNELPOLARITY_RISING;
sSlaveConfig.TriggerFilter = 0;
if (HAL_TIM_SlaveConfigSynchro(&htim2, &sSlaveConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigIC.ICPolarity = TIM_INPUTCHANNELPOLARITY_RISING;
sConfigIC.ICSelection = TIM_ICSELECTION_DIRECTTI;
sConfigIC.ICPrescaler = TIM_ICPSC_DIV1;
sConfigIC.ICFilter = 0;
if (HAL_TIM_IC_ConfigChannel(&htim2, &sConfigIC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
sConfigIC.ICPolarity = TIM_INPUTCHANNELPOLARITY_FALLING;
sConfigIC.ICSelection = TIM_ICSELECTION_INDIRECTTI;
if (HAL_TIM_IC_ConfigChannel(&htim2, &sConfigIC, TIM_CHANNEL_2) != HAL_OK)
{
Error_Handler();
}
}
/* TIM3 init function 输入捕获PWM占空比和周期
从模式复位Reset模式:使用内部时钟作为时钟源,TI1/2外部有效信号复位计数器。
例如,CH1触发输入上升沿有效时,计数器复位到默认值0。
*/
void InputPWM_TIM3_Init(void){
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_SlaveConfigTypeDef sSlaveConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_IC_InitTypeDef sConfigIC = {0};
htim3.Instance = TIM3;
htim3.Init.Prescaler = 80-1;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 65535;
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_Base_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim3, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_IC_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sSlaveConfig.SlaveMode = TIM_SLAVEMODE_RESET;
sSlaveConfig.InputTrigger = TIM_TS_TI1FP1;
sSlaveConfig.TriggerPolarity = TIM_INPUTCHANNELPOLARITY_RISING;
sSlaveConfig.TriggerFilter = 0;
if (HAL_TIM_SlaveConfigSynchro(&htim3, &sSlaveConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigIC.ICPolarity = TIM_INPUTCHANNELPOLARITY_RISING;
sConfigIC.ICSelection = TIM_ICSELECTION_DIRECTTI;
sConfigIC.ICPrescaler = TIM_ICPSC_DIV1;
sConfigIC.ICFilter = 0;
if (HAL_TIM_IC_ConfigChannel(&htim3, &sConfigIC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
sConfigIC.ICPolarity = TIM_INPUTCHANNELPOLARITY_FALLING;
sConfigIC.ICSelection = TIM_ICSELECTION_INDIRECTTI;
if (HAL_TIM_IC_ConfigChannel(&htim3, &sConfigIC, TIM_CHANNEL_2) != HAL_OK)
{
Error_Handler();
}
}
/* TIM6 init function 基本定时器:1S */
void Basic_TIM6_Init(void){
TIM_MasterConfigTypeDef sMasterConfig = {0};
htim6.Instance = TIM6;
htim6.Init.Prescaler = 8000-1;
htim6.Init.CounterMode = TIM_COUNTERMODE_UP;
htim6.Init.Period = 9999;
htim6.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_Base_Init(&htim6) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim6, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
}
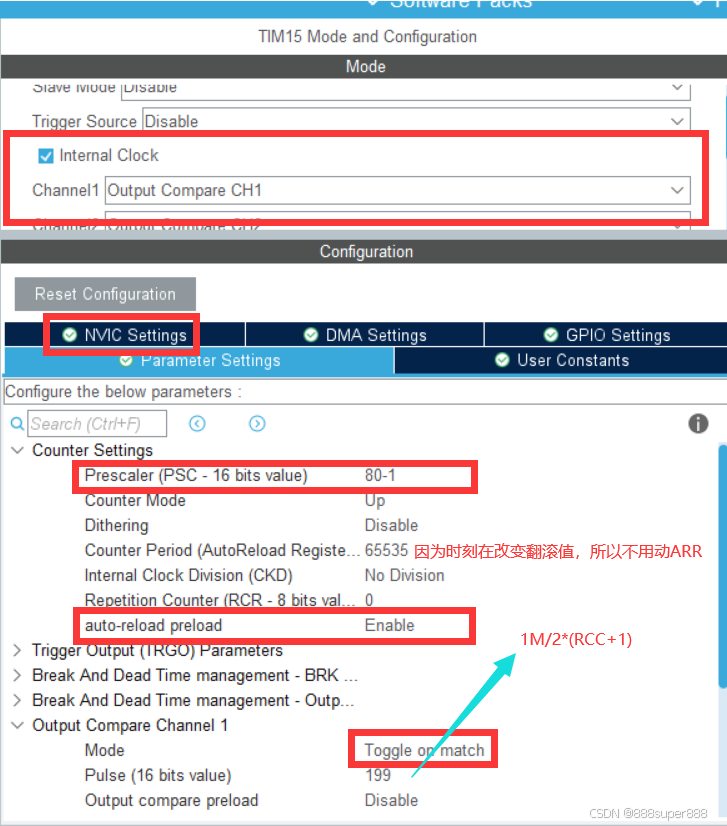
/* TIM15 init function 输出比较模式2:电平翻转模式。当匹配时,引脚状态翻转。*/
void OutputSQU_TIM15_Init(void){
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
TIM_BreakDeadTimeConfigTypeDef sBreakDeadTimeConfig = {0};
htim15.Instance = TIM15;
htim15.Init.Prescaler = 80-1;
htim15.Init.CounterMode = TIM_COUNTERMODE_UP;
htim15.Init.Period = 65535;
htim15.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim15.Init.RepetitionCounter = 0;
htim15.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_Base_Init(&htim15) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim15, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_OC_Init(&htim15) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim15, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_TOGGLE;
sConfigOC.Pulse = 199;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCNPolarity = TIM_OCNPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET;
sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET;
if (HAL_TIM_OC_ConfigChannel(&htim15, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
sConfigOC.Pulse = 99;
if (HAL_TIM_OC_ConfigChannel(&htim15, &sConfigOC, TIM_CHANNEL_2) != HAL_OK)
{
Error_Handler();
}
sBreakDeadTimeConfig.OffStateRunMode = TIM_OSSR_DISABLE;
sBreakDeadTimeConfig.OffStateIDLEMode = TIM_OSSI_DISABLE;
sBreakDeadTimeConfig.LockLevel = TIM_LOCKLEVEL_OFF;
sBreakDeadTimeConfig.DeadTime = 0;
sBreakDeadTimeConfig.BreakState = TIM_BREAK_DISABLE;
sBreakDeadTimeConfig.BreakPolarity = TIM_BREAKPOLARITY_HIGH;
sBreakDeadTimeConfig.BreakFilter = 0;
sBreakDeadTimeConfig.AutomaticOutput = TIM_AUTOMATICOUTPUT_DISABLE;
if (HAL_TIMEx_ConfigBreakDeadTime(&htim15, &sBreakDeadTimeConfig) != HAL_OK)
{
Error_Handler();
}
HAL_TIM_MspPostInit(&htim15);
}
/* TIM16 init function 输出PWM模式1
在递增计数时,TIMx_CNT<TIMx_CCRx时OCxREF为有效电平,否则为无效电平;
在递减计数时,TIMx_CNT>TIMx_CCRx时OCxREF为无效电平,否则为有效电平。
*/
void OutputPWM_TIM16_Init(void){
TIM_OC_InitTypeDef sConfigOC = {0};
TIM_BreakDeadTimeConfigTypeDef sBreakDeadTimeConfig = {0};
htim16.Instance = TIM16;
htim16.Init.Prescaler = 80-1;
htim16.Init.CounterMode = TIM_COUNTERMODE_UP;
htim16.Init.Period = 999;
htim16.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim16.Init.RepetitionCounter = 0;
htim16.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_Base_Init(&htim16) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_Init(&htim16) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 300;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCNPolarity = TIM_OCNPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET;
sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET;
if (HAL_TIM_PWM_ConfigChannel(&htim16, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
sBreakDeadTimeConfig.OffStateRunMode = TIM_OSSR_DISABLE;
sBreakDeadTimeConfig.OffStateIDLEMode = TIM_OSSI_DISABLE;
sBreakDeadTimeConfig.LockLevel = TIM_LOCKLEVEL_OFF;
sBreakDeadTimeConfig.DeadTime = 0;
sBreakDeadTimeConfig.BreakState = TIM_BREAK_DISABLE;
sBreakDeadTimeConfig.BreakPolarity = TIM_BREAKPOLARITY_HIGH;
sBreakDeadTimeConfig.BreakFilter = 0;
sBreakDeadTimeConfig.AutomaticOutput = TIM_AUTOMATICOUTPUT_DISABLE;
if (HAL_TIMEx_ConfigBreakDeadTime(&htim16, &sBreakDeadTimeConfig) != HAL_OK)
{
Error_Handler();
}
HAL_TIM_MspPostInit(&htim16);
}
/* TIM17 init function 输出PWM模式1
在递增计数时,TIMx_CNT<TIMx_CCRx时OCxREF为有效电平,否则为无效电平;
在递减计数时,TIMx_CNT>TIMx_CCRx时OCxREF为无效电平,否则为有效电平。
*/
void OutputPWM_TIM17_Init(void){
TIM_OC_InitTypeDef sConfigOC = {0};
TIM_BreakDeadTimeConfigTypeDef sBreakDeadTimeConfig = {0};
htim17.Instance = TIM17;
htim17.Init.Prescaler = 80-1;
htim17.Init.CounterMode = TIM_COUNTERMODE_UP;
htim17.Init.Period = 999;
htim17.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim17.Init.RepetitionCounter = 0;
htim17.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_Base_Init(&htim17) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_Init(&htim17) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 800;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCNPolarity = TIM_OCNPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET;
sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET;
if (HAL_TIM_PWM_ConfigChannel(&htim17, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
sBreakDeadTimeConfig.OffStateRunMode = TIM_OSSR_DISABLE;
sBreakDeadTimeConfig.OffStateIDLEMode = TIM_OSSI_DISABLE;
sBreakDeadTimeConfig.LockLevel = TIM_LOCKLEVEL_OFF;
sBreakDeadTimeConfig.DeadTime = 0;
sBreakDeadTimeConfig.BreakState = TIM_BREAK_DISABLE;
sBreakDeadTimeConfig.BreakPolarity = TIM_BREAKPOLARITY_HIGH;
sBreakDeadTimeConfig.BreakFilter = 0;
sBreakDeadTimeConfig.AutomaticOutput = TIM_AUTOMATICOUTPUT_DISABLE;
if (HAL_TIMEx_ConfigBreakDeadTime(&htim17, &sBreakDeadTimeConfig) != HAL_OK)
{
Error_Handler();
}
HAL_TIM_MspPostInit(&htim17);
}
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef* tim_baseHandle){
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(tim_baseHandle->Instance==TIM2)
{
/* TIM2 clock enable */
__HAL_RCC_TIM2_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**TIM2 GPIO Configuration
PA15 ------> TIM2_CH1
*/
GPIO_InitStruct.Pin = GPIO_PIN_15;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF1_TIM2;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* TIM2 interrupt Init */
HAL_NVIC_SetPriority(TIM2_IRQn, 3, 0);
HAL_NVIC_EnableIRQ(TIM2_IRQn);
}
else if(tim_baseHandle->Instance==TIM3)
{
/* TIM3 clock enable */
__HAL_RCC_TIM3_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/**TIM3 GPIO Configuration
PB4 ------> TIM3_CH1
*/
GPIO_InitStruct.Pin = GPIO_PIN_4;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF2_TIM3;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* TIM3 interrupt Init */
HAL_NVIC_SetPriority(TIM3_IRQn, 3, 0);
HAL_NVIC_EnableIRQ(TIM3_IRQn);
}
else if(tim_baseHandle->Instance==TIM6)
{
/* TIM6 clock enable */
__HAL_RCC_TIM6_CLK_ENABLE();
/* TIM6 interrupt Init */
HAL_NVIC_SetPriority(TIM6_DAC_IRQn, 2, 0);
HAL_NVIC_EnableIRQ(TIM6_DAC_IRQn);
}
else if(tim_baseHandle->Instance==TIM15)
{
/* TIM15 clock enable */
__HAL_RCC_TIM15_CLK_ENABLE();
/* TIM15 interrupt Init */
HAL_NVIC_SetPriority(TIM1_BRK_TIM15_IRQn, 3, 0);
HAL_NVIC_EnableIRQ(TIM1_BRK_TIM15_IRQn);
}
else if(tim_baseHandle->Instance==TIM16)
{
/* TIM16 clock enable */
__HAL_RCC_TIM16_CLK_ENABLE();
}
else if(tim_baseHandle->Instance==TIM17)
{
/* TIM17 clock enable */
__HAL_RCC_TIM17_CLK_ENABLE();
}
}
void HAL_TIM_MspPostInit(TIM_HandleTypeDef* timHandle){
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(timHandle->Instance==TIM15)
{
/* USER CODE BEGIN TIM15_MspPostInit 0 */
/* USER CODE END TIM15_MspPostInit 0 */
__HAL_RCC_GPIOA_CLK_ENABLE();
/**TIM15 GPIO Configuration
PA2 ------> TIM15_CH1
PA3 ------> TIM15_CH2
*/
GPIO_InitStruct.Pin = GPIO_PIN_2|GPIO_PIN_3;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF9_TIM15;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USER CODE BEGIN TIM15_MspPostInit 1 */
/* USER CODE END TIM15_MspPostInit 1 */
}
else if(timHandle->Instance==TIM16)
{
/* USER CODE BEGIN TIM16_MspPostInit 0 */
/* USER CODE END TIM16_MspPostInit 0 */
__HAL_RCC_GPIOA_CLK_ENABLE();
/**TIM16 GPIO Configuration
PA6 ------> TIM16_CH1
*/
GPIO_InitStruct.Pin = GPIO_PIN_6;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF1_TIM16;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USER CODE BEGIN TIM16_MspPostInit 1 */
/* USER CODE END TIM16_MspPostInit 1 */
}
else if(timHandle->Instance==TIM17)
{
/* USER CODE BEGIN TIM17_MspPostInit 0 */
/* USER CODE END TIM17_MspPostInit 0 */
__HAL_RCC_GPIOA_CLK_ENABLE();
/**TIM17 GPIO Configuration
PA7 ------> TIM17_CH1
*/
GPIO_InitStruct.Pin = GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF1_TIM17;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USER CODE BEGIN TIM17_MspPostInit 1 */
/* USER CODE END TIM17_MspPostInit 1 */
}
}1.TIM6和TIM7基本定时器配置,一般定时为1s,PSC=8000-1,ARR=10000-1;
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim){
static uint16_t counter=0;
if(htim->Instance==TIM6){
sprintf((char *)Uart_String, "%04d:Hello,world.\r\n", counter);
HAL_UART_Transmit(&huart1,(unsigned char *)Uart_String, strlen((char *)Uart_String), 50);
if(++counter==10000)counter=0;
}
}2.TIM2和TIM3:测量输入PWM的周期和占空比,需要开启TIM2的IC通道1和2的中断,以及TIM3通道1和2的中断;PSC=80-1,ARR=65535;
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim){
if(htim->Instance == TIM3){
if(htim->Channel ==HAL_TIM_ACTIVE_CHANNEL_1){
InputPWM1_T=HAL_TIM_ReadCapturedValue(&htim3,TIM_CHANNEL_1)+1;
InputPWM1_Duty=1.0*InputPWM1_High/InputPWM1_T;
}else if(htim->Channel ==HAL_TIM_ACTIVE_CHANNEL_2){
InputPWM1_High=HAL_TIM_ReadCapturedValue(&htim3,TIM_CHANNEL_2)+1;
}
}
if(htim->Instance == TIM2){
if(htim->Channel ==HAL_TIM_ACTIVE_CHANNEL_1){
InputPWM2_T=HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_1)+1;
InputPWM2_Duty=1.0*InputPWM2_High/InputPWM2_T;
}else if(htim->Channel ==HAL_TIM_ACTIVE_CHANNEL_2){
InputPWM2_High=HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_2)+1;
}
}
}3.TIM15:输出2路不同频率,占空比为50%的方波,需要开启TIM15的OC通道1和2的中断,以及TIM3通道1和2的中断;PSC=80-1,ARR=65535;
void HAL_TIM_OC_DelayElapsedCallback(TIM_HandleTypeDef *htim){
if(htim->Instance ==TIM15){
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1){
__HAL_TIM_SetCompare(&htim15,TIM_CHANNEL_1,(__HAL_TIM_GetCounter(&htim15)+499));//1K
}else if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_2){
__HAL_TIM_SetCompare(&htim15,TIM_CHANNEL_2,(__HAL_TIM_GetCounter(&htim15)+99));//5K
}
}
}4.TIM16和TIM17:输出2路频率相同,占空比不同的PWM,TIM16通道1和TIM17通道1;PSC=80-1,ARR=1000-1;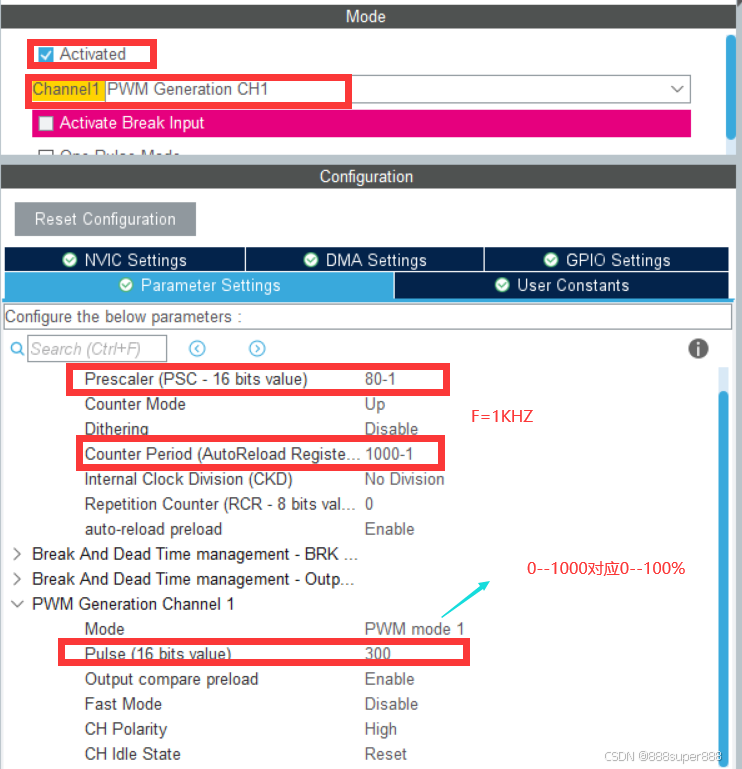


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









