



 博客介绍了采用阿里云镜像进行下载的相关内容,包括镜像网址,还提及进入选择环节,指导用户选择适合自己的镜像进行下载。
博客介绍了采用阿里云镜像进行下载的相关内容,包括镜像网址,还提及进入选择环节,指导用户选择适合自己的镜像进行下载。
采用的是阿里云镜像
镜像网址
http://mirrors.aliyun.com/ubuntu-releases/
下载选择
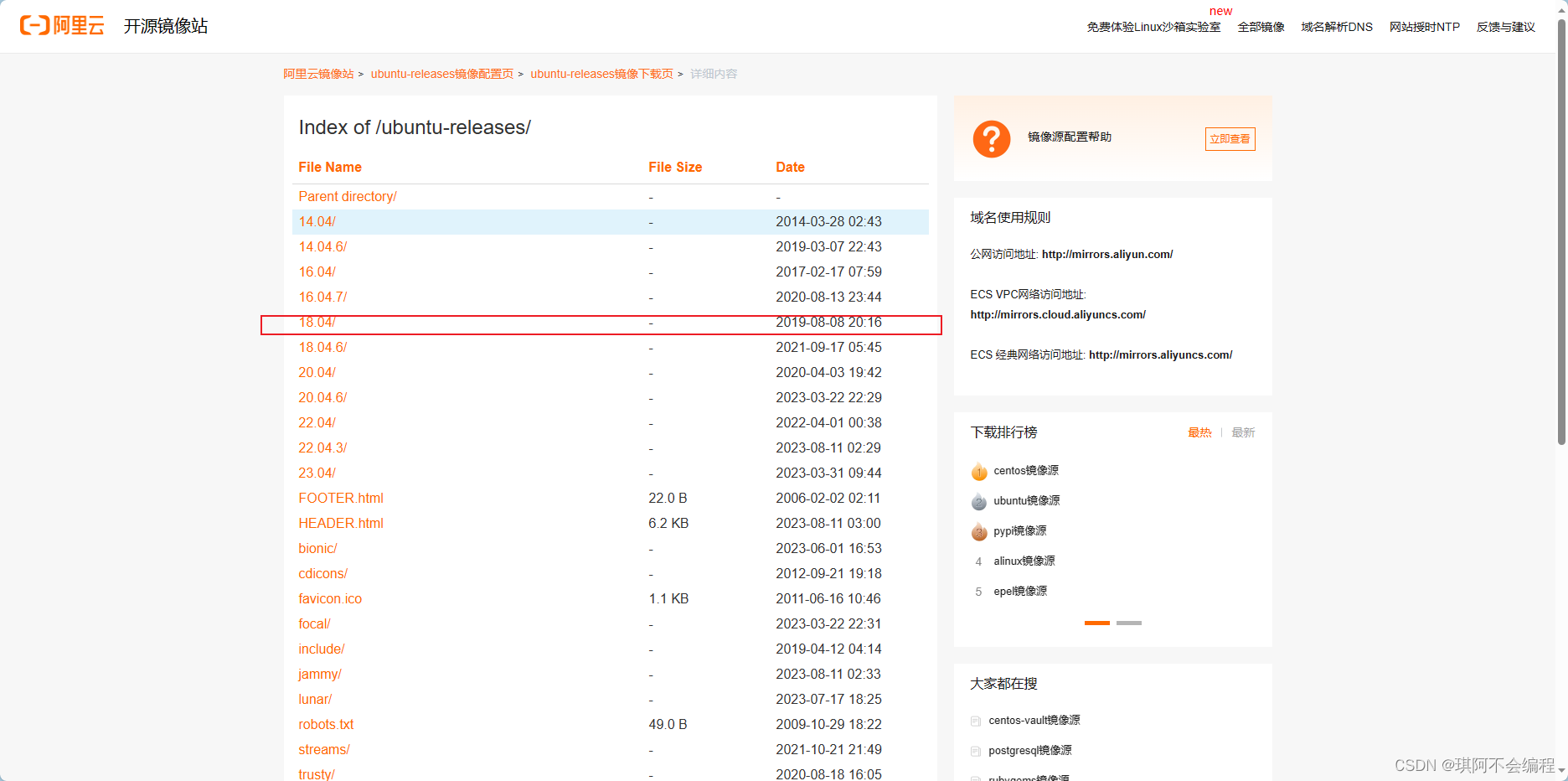
进入选择
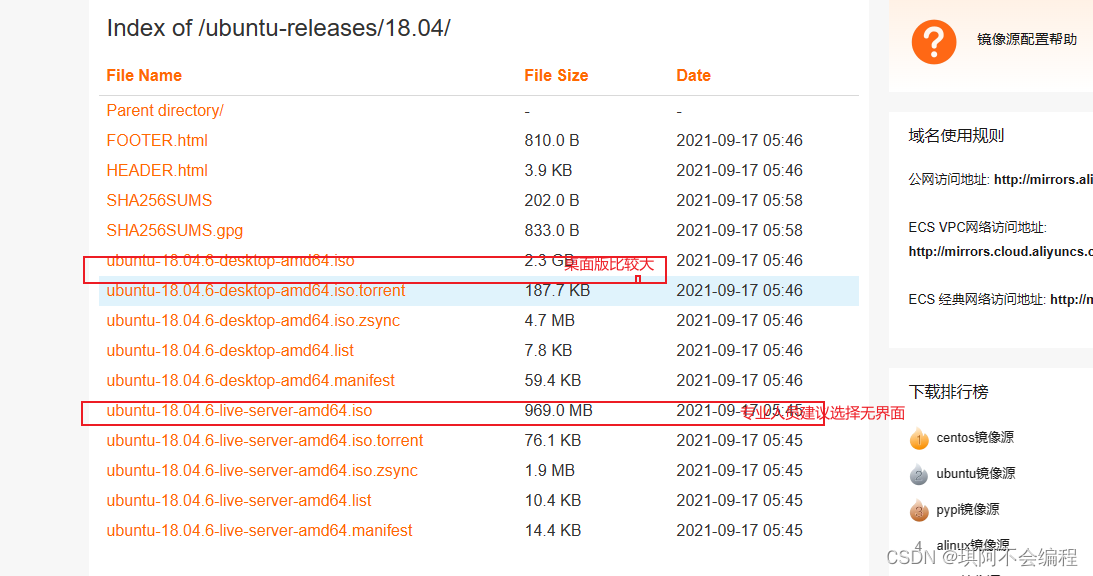
选择适合自己的下载
采用的是阿里云镜像
镜像网址
http://mirrors.aliyun.com/ubuntu-releases/
下载选择
进入选择
选择适合自己的下载
 452
1927
10万+
2587
2万+
452
1927
10万+
2587
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























