







目录
一、读取点云数据
查看安装包:
pip list

获取数据:
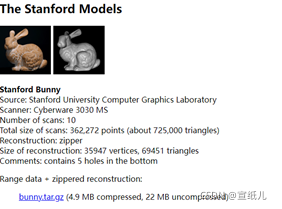
斯坦福兔子The Stanford 3D Scanning Repository
 |
 |
完整代码:
import open3d as o3d
import numpy as np
print("Open3D read Point Cloud")
pcd=o3d.io.read_point_cloud(r"bunny10k.ply") #读取
print(pcd) #打印点云的点数
o3d.visualization.draw_geometries([pcd],width=800,height=600) #显示
#o3d.io.write_point_cloud(r"data\newrabbit.pcd",pcd) #另存
运行结果:
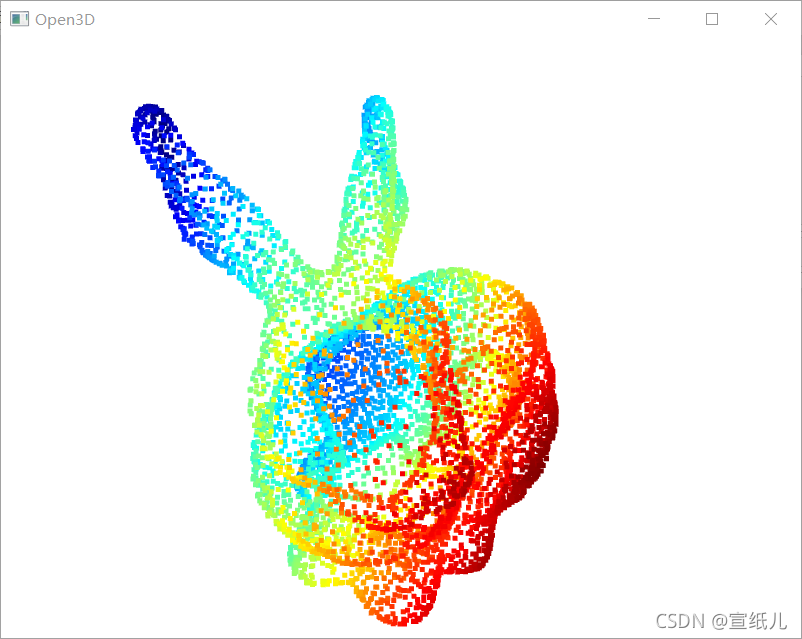
(多角度点云拼接,有大量重复,生成整个点云)
![]()
二、近邻搜索
一般扫描仪扫描结果有很多噪点,可以采用近邻搜索的方式进行降噪
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









