







倒立摆控制系统设计
倒立摆系统是一个典型的快速、多变量、非线性、不稳定系统,对倒立摆的控制研究无论在理论上和方法上都有深远的意义。
本论文以实验室原有的直线一级倒立摆实验装置为平台,重点研究其PID控制方法,设计出相应的PID控制器,并将控制过程在MATLAB上加以仿真。
本文主要研究内容是:首先概述自动控制的发展和倒立摆系统研究的现状;介绍倒立摆系统硬件组成,对单级倒立摆模型进行建模,并分析其稳定性;首先应用频率法进行了超前校正,但输出效果存在着超调量45%的不足,因此第四章应用MATLAB自带的piatuner工具设计了pid控制器,最终倒立摆系统的控制实现了稳定输出,并且快速性良好的优良输出性能,以MATLAB为基础,通过在线调整参数,比较了以上两种控制方法的效果;基于PID控制器的倒立摆系统具备快速性和稳定性的结论。
关键词:一级倒立摆;PID;MATLAB仿真
目录
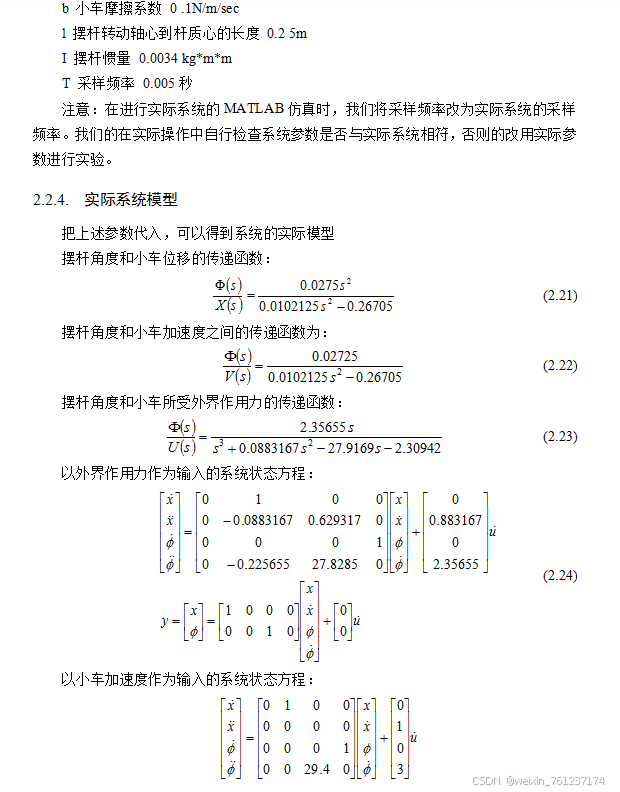
倒立摆数学建模
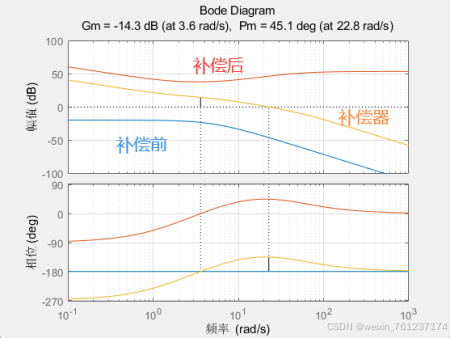
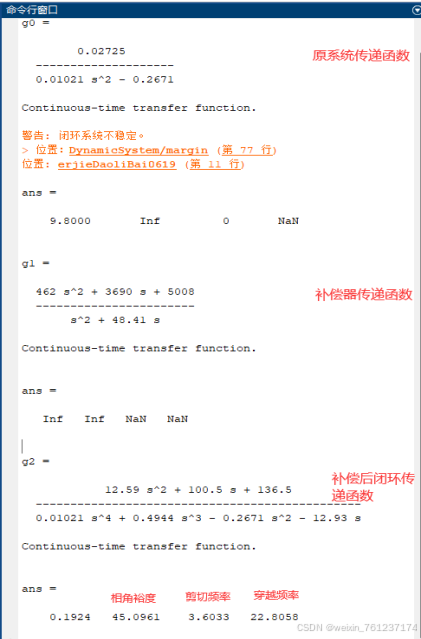
频率法超前校正倒立摆系统
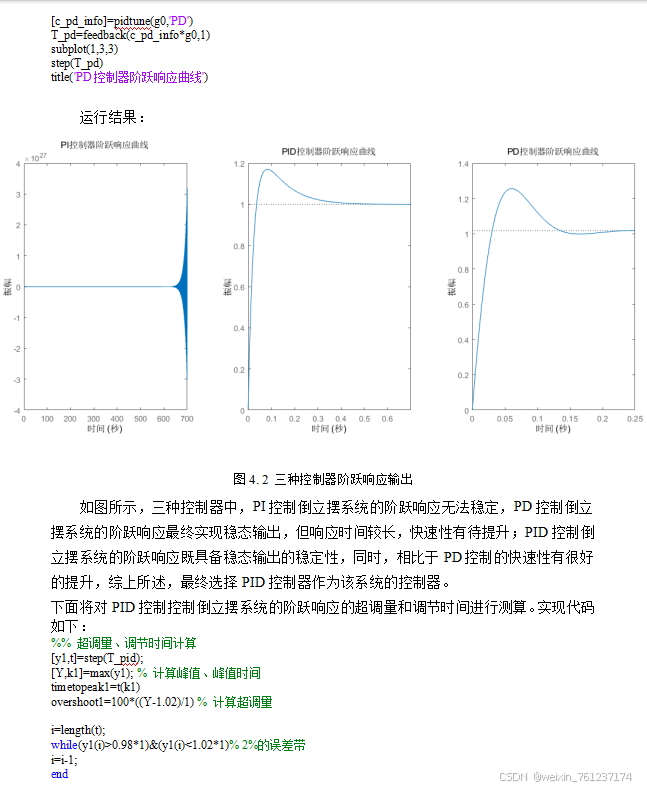
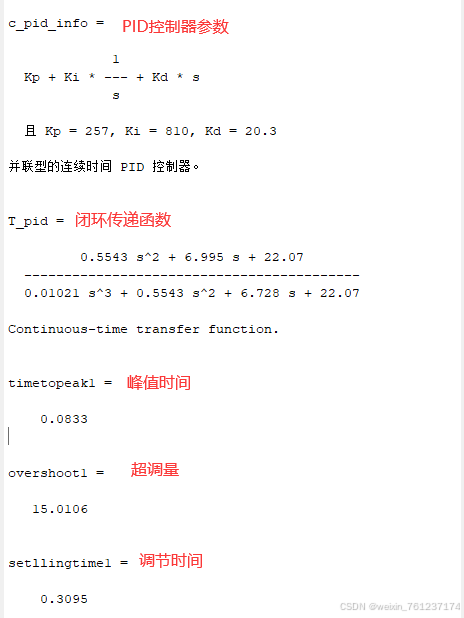
第四章 倒立摆的PID控制器设计



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











