







1.摘要
建筑物轮廓线提取是三维城市重建的关键环节。传统 Alpha-shapes 轮廓线提取算法具有鲁棒性强且易于实现的优点,但所提取的轮廓线容易受噪声点的干扰,难以获得准确的轮廓边缘。针对该问题,提出了一种改进的Alpha-shapes 轮廓线提取算法。首先,采用随机抽样一致性算法筛选由 Alpha-shapes 算法提取的初始轮廓点;然后,用道格拉斯普克算法确定关键轮廓点;最后,通过强制正交优化提取准确的轮廓线。用三组不同形状建筑物的点云进行实验,结果表明,本算法能获得更准确的建筑物边缘,有效克服了传统 Alpha-shapes 算法提取的轮廓边缘锯齿状现象,正确率、完整率、质量也均优于传统 Alpha-shapes 算法。
2.基本原理
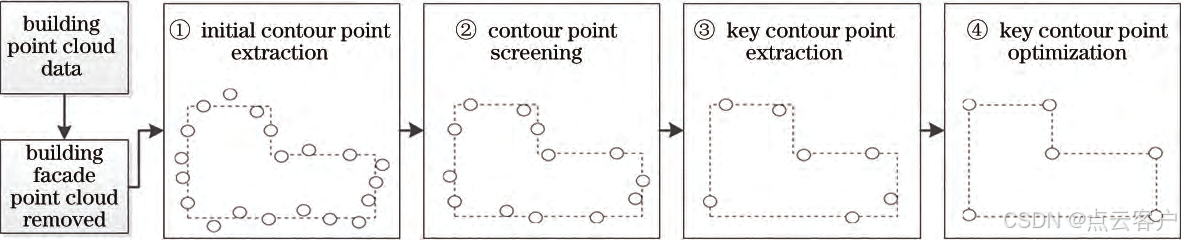
改进 Alpha-shapes 建筑物轮廓线提取算法的流程图如图 1 所示。首先,利用图割方法移除建筑物的立面扫描点;然后,用 Alpha-shapes 算法提取屋顶点云的初始轮廓点,用 RANSAC 算法对初始轮廓点进行拟合,获取轮廓线,只保留距离轮廓线较近的轮廓点;最后,用道格拉斯普克(D-P)算法获取关键 轮 廓 点 ,并 利 用 强 制 正 交 的 方 式 优 化 关 键 轮 廓点,获取最终的轮廓线。具体步骤包括初始轮廓点提取、轮廓点筛选、关键轮廓点提取以及关键轮廓点优化。
2.1建筑物立面扫描点的移除
由于激光脉冲通过斜向下方式对地面进行扫描,部分激光束会从建筑物的侧面反射回接收器,导
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











