







 本文介绍了如何将毫米波雷达的坐标数据转换到世界坐标系中,主要涉及从极坐标到笛卡尔坐标的转换,以及通过旋转和平移实现坐标变换的数学原理。作者引用了相关资料,并指出由于毫米波雷达数据缺少z轴信息,转换过程简化为二维坐标系的转换。最后,作者邀请读者指正可能存在的错误,并分享了相关融合技术的文章链接。
本文介绍了如何将毫米波雷达的坐标数据转换到世界坐标系中,主要涉及从极坐标到笛卡尔坐标的转换,以及通过旋转和平移实现坐标变换的数学原理。作者引用了相关资料,并指出由于毫米波雷达数据缺少z轴信息,转换过程简化为二维坐标系的转换。最后,作者邀请读者指正可能存在的错误,并分享了相关融合技术的文章链接。
在了解了基本的坐标转换理论之后,任意传感器到世界坐标系的转换就应该都可以进行转换了,这次趁着热乎试着写写毫米波雷达坐标到世界坐标系的转换
问题是额,我目前还没有接触到毫米波雷达实体,因此参考了[知乎专栏-无人驾驶干货铺](https://zhuanlan.zhihu.com/p/34675392)的数据
2.毫米波雷达到世界坐标的转换
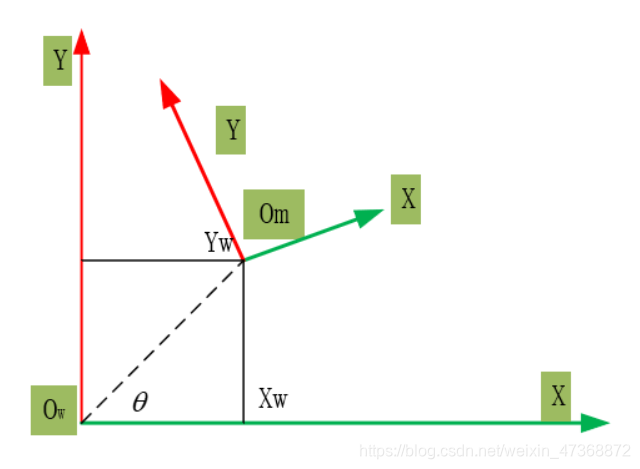
前言:毫米波雷达可以得到目标的x,y坐标信息,没有目标 的z的信息,所以这也方便了我们进行坐标转换,直接可以将毫米波坐标系 O m Om Om到世界坐标系 O w Ow Ow转换看作二维坐标系的转换,根据之前的基础进行旋转和平移。
毫米波数据坐标系的转换
由于毫米波雷达的测距和测速原理是基于多普勒效应,因此与常用的笛卡尔坐标系不同,毫米波雷达的原始数据是基于(距离+角度)的极坐标系。所以我们首先需要根据高中的知识进行数据的两种坐标系转换。
{
X
=
ρ
cos
θ
Y
=
ρ
sin
θ
\begin{cases}X=\rho\cos \theta \\ Y=\rho\sin \theta \end{cases}
{X=ρcosθY=ρsinθ
由上一篇文章中的公式:我们可以得到毫米波坐标到世界坐标系的转换
旋转(绕Z轴)
R ( Z A , θ ) = [ cos θ − sin θ 0 sin θ cos θ 0 0 0 1 ] R\left( Z_{A},\theta \right) =\begin{bmatrix} \cos \theta & -\sin \theta & 0 \\ \sin \theta & \cos \theta & 0 \\ \ 0 & 0 & 1 \end{bmatrix} R(ZA,θ)=⎣⎡cosθsinθ 0−sinθcosθ0001⎦⎤
平移
[ X m Y m 1 ] = R ( Z A , θ ) [ X w Y w Z w ] + T \begin{bmatrix} X_{m} \\ Y_{m} \\ 1 \end{bmatrix}=R\left( Z_{A},\theta \right)\begin{bmatrix} X_{w} \\ Y_{w} \\ Z_{w} \end{bmatrix}+T ⎣⎡XmYm1⎦⎤=R(ZA,θ)⎣⎡XwYwZw⎦⎤+T
T = [ X W Y W 1 ] T=\begin{bmatrix} X_{W} \\ Y_{W} \\ 1 \end{bmatrix} T=⎣⎡XWYW1⎦⎤
最后三个式子联立起来就好啦
最后,我也刚刚入门,非常可能有推导出错的地方,希望大家评论区教教我,十分感谢~
部分的知识,还有图片来自这篇文章,也是讲融合的,大家感兴趣可以看一下
毫米波雷达与视觉融合———联合标定及外参标定问题


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









