






 协同感知是一种通过多传感器协作增强感知效果的技术,涉及数据处理、分布式计算和AI。它分为早期、中期、后期和混合协同四种类型。车路协同(C-V2X)利用这种技术,实现车辆与车辆、基础设施、行人及互联网的通信,提高驾驶安全和交通效率。
协同感知是一种通过多传感器协作增强感知效果的技术,涉及数据处理、分布式计算和AI。它分为早期、中期、后期和混合协同四种类型。车路协同(C-V2X)利用这种技术,实现车辆与车辆、基础设施、行人及互联网的通信,提高驾驶安全和交通效率。
1.协同感知概念
协同感知(collaborative perception)是指通过将多个传感器之间相互协作,并将传感器收集到的数据处理与整合,以产生更准确、更完整的感知结果的一种技术。传感器可以是物理传感器、虚拟传感器,或移动设备。协同感知利用的是分布式感知的实现形式,解决了单体感知中,远距离遮挡和稀疏数据两个主要问题。
协同感知通常涉及的算法和技术有:数据处理、分布式计算和人工智能等。这些技术可以帮助智能体用传感器捕捉数据,并从数据中提取有用信息和知识,以完成相应的任务。
2.协同感知分类
在协同感知中,协同可分为四类,分别为早期协同、中期协同、后期协同和混合协同。
(1) 早期协同
早期协同在输入空间中进行协同,每个代理的原始数据进行协同共享,可以实现原始数据融合而不会有损失,并且协同感知的性能通常是最好的。然而,原始数据的传输消耗大量通信资源,特别是在参与协作的单位数量众多且对实时感知有高要求的情况下,早期协同很难满足需求。
(2) 中期协同
中间协同在中间特征空间中进行协同,每个智能体首先将原始数据处理成中间特征,融合这些特征后,每个智体对融合的特征进行解码并产生感知结果。中间特征使得恢复原始信息更容易,同时也更加灵活,更容易被压缩以节省通信资源。
(3) 后期协同
后期协同在输出空间中进行协同,每个代理独立产生的感知结果进行协作共享,这种合作在通信成本方面非常划算。然而,由于结果是基于自己的不完整观察,存在固有的噪声或误差。
(4) 混合协同
混合协同是上述两种或更多协同模式的组合。由于每种协同模式都有其优点和缺点,结合多种协同模式有助于优化协同策略。
3.协同感知的应用——车路协同(C-V2X)
车路协同利用车辆和基础设施之间的通信与感知技术来实现交通管理和控制,从而使车辆及交通基础设施之间实现信息共享和互动。
C-V2X是车路协同技术的缩写。其中,C(Cellular)为蜂窝,它是基于3G/4G/5G等蜂窝网通信技术演进形成的车用无线通信技术。V2X是Vehicle to Everything的缩写,即“车联万物”,其包含车与车之间、车与行人之间、车与路边基础设施之间,以及车与网络等进行信息交互。
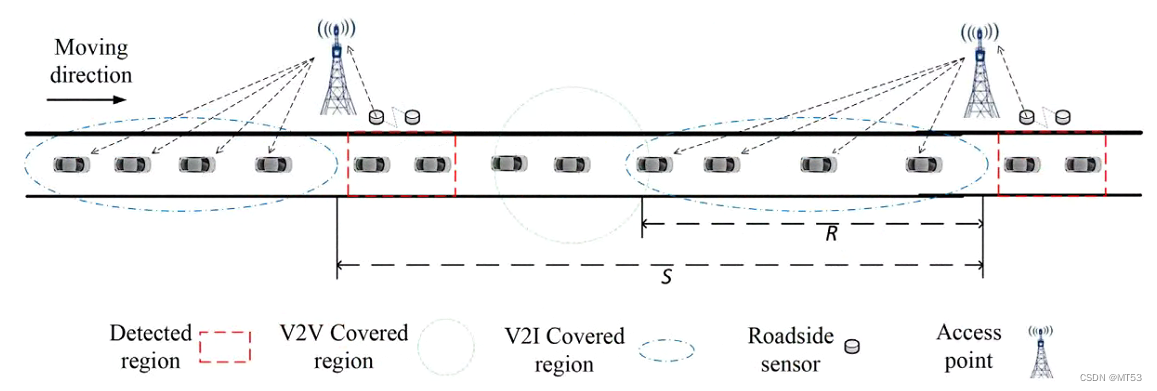
1.车辆与车辆通讯(V2V)
车辆之间实现车辆基础信息的交互共享,通过对其他车辆的基础信息信理,能够判断周边车辆驾驶情况,从而提前进行驾驶规划。例如提前避让紧急或特殊车辆、碰撞预警等功能。
2.车辆与基础设施通讯(V2I)
车辆与路测基础设施的通信,如红绿灯、交通摄像头和路侧单元等。除了常规的限速预警与道路标识提醒,路侧基础设施也可以获取附近区域车辆的信息并发布各种实时信息,还可以下发引导信息对车辆进行行驶路径规划,如道路施工、闯红灯预警和动态车道管理等功能。
3.车辆与行人通讯(V2P)
车与人之间实现交通信息的共享交互。未来人们的移动智能终端可以作为V2P通信连接的单元节点,车辆实时接收行人位置,分析行人行为,预判行人的运动轨迹,从而调整驾驶决策。
4.车辆与互联网通讯(V2N)
车载设备接入网络与云平台连接,通过网络和云平台与车辆之间进行数据交互,并对获取的数据进行存储和处理,提供车辆所需要的各类应用服务。V2N通信主要应用于车辆导航、车辆远程监控,和紧急救援等。
通过以上描述的V2X直连通信和蜂窝网络双重通信技术,可以实现车路协同感知中更远距离和更大范围的可靠通信,在解决单车感知的局限性的同时,有效地提高驾驶安全,并降低交通隐患。

















 761
761

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









