









1、概念了解
首先了解到,PWM生成是在通用定时器的基础上配置的。每个通用定时器都有多路通道输出PWM信号,这里以TIM4(定时器4)为例。
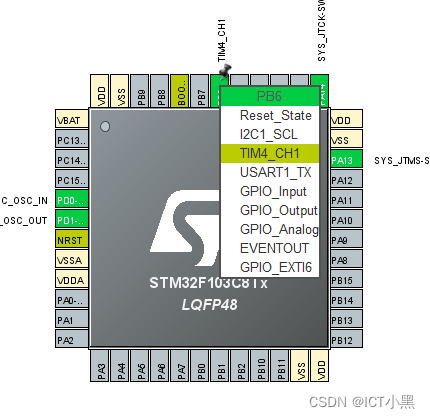
//在图形配置面板找到TIM4的通道一作为PWM输出管脚,
其管脚为PB6。
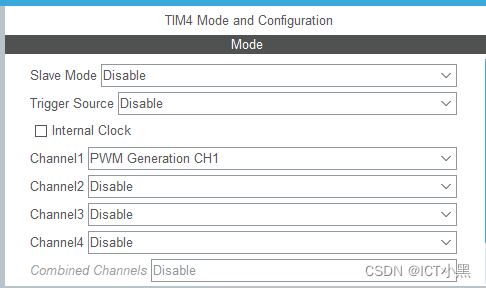
//打开左侧定时器配置面板,可以看到Channel1配置为
PWM Generation CH1.
2、舵机控制基础
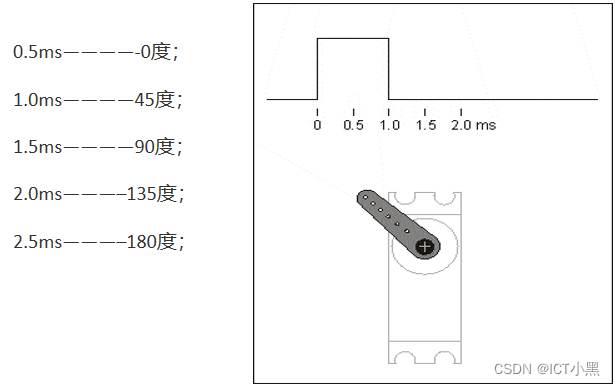
舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms-2.5ms范围,总间隔为2ms。脉冲的宽度将决定马达转动的距离。例如:1.5毫秒的脉冲,电机将转向90度的位置(通常称为中立位置,对于180°舵机来说,就是90°位置)。如果脉冲宽度小于1.5毫秒,那么电机轴向朝向0度方向。如果脉冲宽度大于1.5毫秒,轴向就朝向180度方向。以180度舵机为例,对应的控制关系是这样的:
3、具体参数配置
通过了解STM32资源可以知道,除高级定时器是挂在APB2总线上,其它定时器(基本、通用定时器)都是挂在APB1总线(较APB2总线速度低一半上。

打开左侧定时器的PWM参数配置面板,为了产生一个20ms的脉冲周期,我们需要配置 Prescaler(预分频系数)和 Counter Period(重装载值)。已知我们配置TIM4的时钟频率为36MHz,
故需配置 Prescaler为360-1(理论上配置36所产生的更高频率的信号对PWM的效果更好),Counter Period 为2000-1,计算公式为 360 X 2000 / 36M=0.02s=20ms(50Hz)
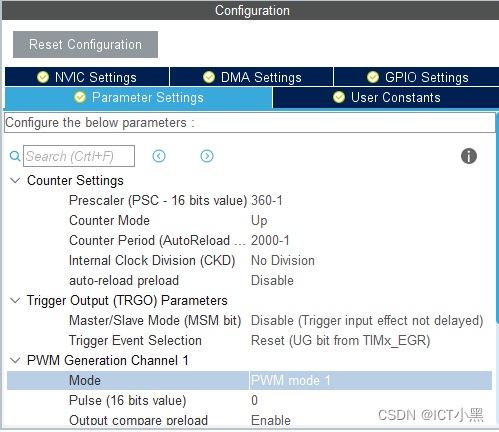
//默认为PWM模式1,Pulse(脉冲宽度)为0,Pulse / Counter Period =占空比。
4、函数代码分析
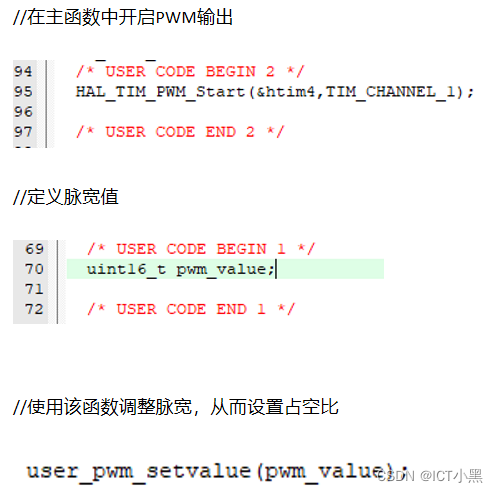
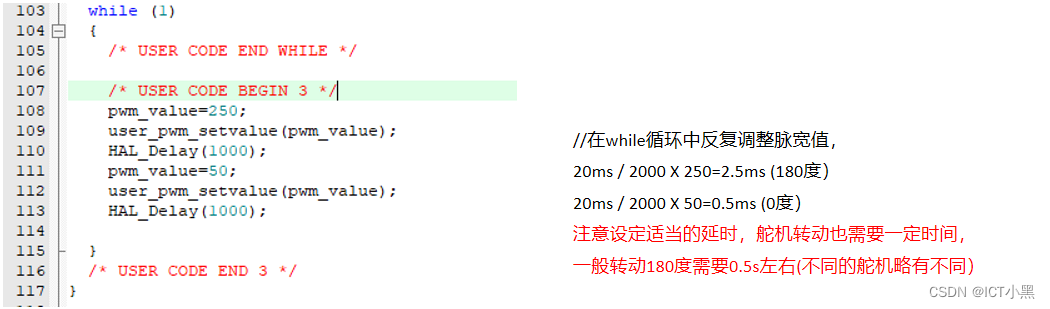
5、实例分析
要求:让舵机在0度到180度来回摆动。
未经允许,严禁转载!

















 2424
2424

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









