







 本文深入探讨MIT 6.824课程中的Fault-Tolerant Virtual Machines设计,重点讲解确定性重播实现、故障检测与响应策略以及实际部署中的挑战,阐述如何构建基于状态机的高可用分布式系统,确保在服务器故障时能够无缝切换并保持数据一致性。
本文深入探讨MIT 6.824课程中的Fault-Tolerant Virtual Machines设计,重点讲解确定性重播实现、故障检测与响应策略以及实际部署中的挑战,阐述如何构建基于状态机的高可用分布式系统,确保在服务器故障时能够无缝切换并保持数据一致性。
文章目录
概述
本文是MIT 6.824 Lec4的先修内容。
Introduction
实现一个fault-tolerant系统基本上由两种设计思路:
- 主从备份:这种方法backup server的状态必须时刻与master server保持同步,这样master宕机后,backup才可以立刻变为新的master。但保持相同的状态需要master不断地发送自己地状态信息,需要占用大量带宽。
- 状态机:这种方法将servers看成是由确定状态组成地状态机。每个server都从相同地初始状态出发,并且保证它们以相同地顺序接受相同地输入。对于不确定性地输入,需要额外地操作来协同servers间地状态。这种方式所需要传送地数据量大大少于第一种方法。
VM设计了一套建立在Hypervisor之上的基于状态机的高容错分布式系统架构。 在物理机上确保确定性执行是困难的,因为其会接收到很多不确定输入( 如定时器中断 )。Hypervisor 对硬件进行模拟和控制,可以捕获到这些不确定输入的所有相关信息,使得 backup 可以重放这些不确定输入 。 因为我们讨论的故障主要是指服务器故障,因此不同的虚拟机要位于不同的物理机上,否则便失去了容错的意义 。
基本FT设计
VM FT的基本架构如下图所示。
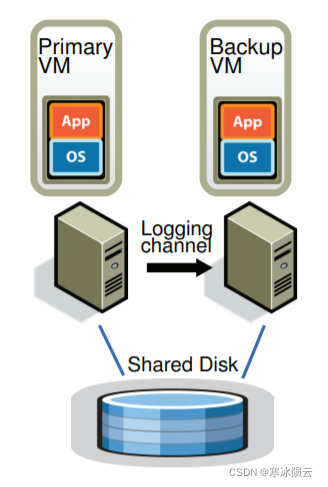
primary vm和backup vm运行在不同的物理机上,并且都可以访问到shared disk server。对于外界来说,只知道primary vm的存在,因此所有的输入(网络,鼠标,键盘等)都发送到primary vm。primary vm收到输入后,通过logging channel的网络连接发送给backup vm,以保证两者的状态相同。backup vm的执行结果与primary vm相同,但是只有primary vm将结果返回给clients,backup vm的执行结果被hypervisor抛弃。系统使用primary vm和backup vm之间的心跳包和logging channel上的流量监控来检测primary vm或backup vm是否存活。必须保证同时只存在一个primary vm,来防止brain split的情况发生。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









