






预备知识:
由机器人运动学可知,末端点的空间姿态与各个关节角度(θ)的联系(即正向解FK,逆向解IK)
一——雅可比矩阵就是在此基础上进行微分,从而得到速度与角速度之间的关系
注:雅可比矩阵市一个标量函数的导数概念的推广。
雅可比矩阵的作用:
1.规划施行光滑轨迹。
2.决定奇异位形。
3.协调拟人动作。
4.推导运动的动力学方程。
5.机器臂末端的力(f)和力矩()与机器臂各个关节角度之间的关系
二——反矩阵
反矩阵就是对各个关节角速度一种表达,然后可以推导出机器臂移动坐标系的的角速度和线速度。
定义: n维方阵 S + S 的转置 =0

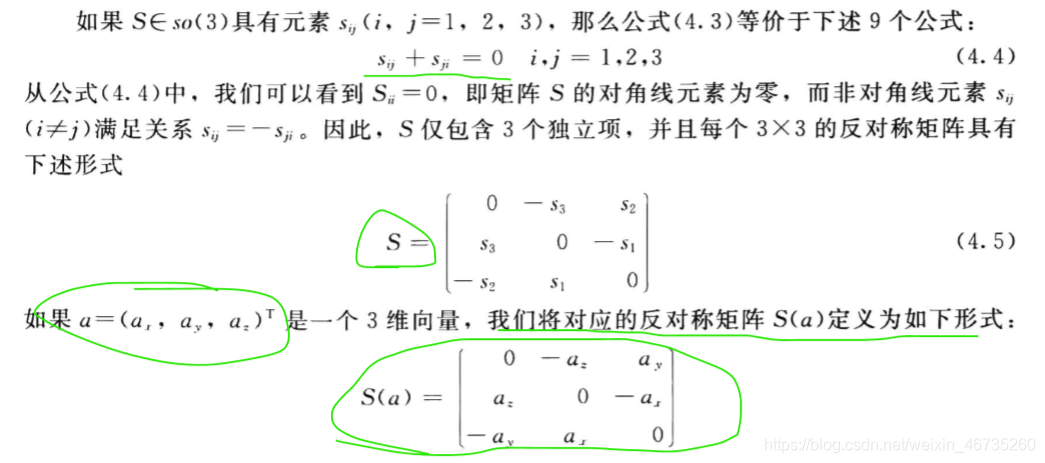
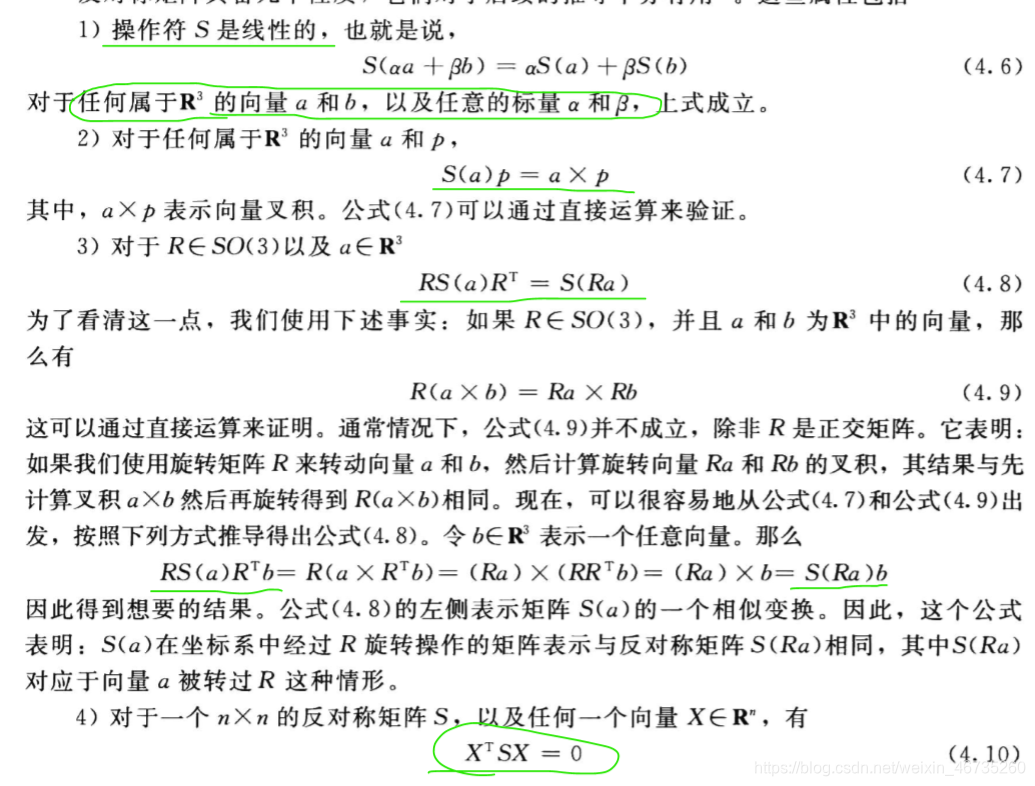
反矩阵的性质:
运动学中 旋转矩阵R的导数
$$$$结论
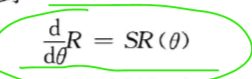
这个公式表示 dR 可以由反矩阵来表示。其中θ是函数变量。
三.角速度:
固定轴情况:=dθ * p 点乘
注 :p为旋转轴的单位向量
线速度:v=ω X r 叉乘
注:r 为研究点到旋转轴的向量(运动半径)
———————推导反矩阵与角速度,和时间的关系:
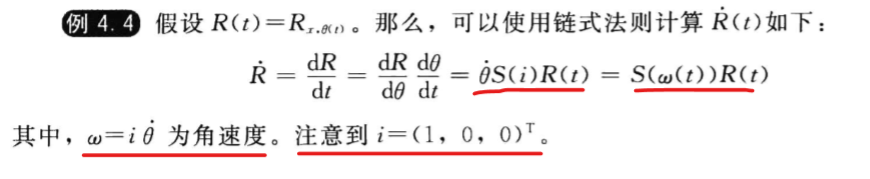
注:图中dθ 是一个标量。
$$$$结论
可得![]()
————————————以上推导的是一个运动点的角速度————————————————————————
多点角速度求和推导:
空间坐标系中三个点的角速度
1.旋转矩阵表示:![]()
2.求导:![]()
3.代入反矩阵:![]()
$$$$结论:
推广到无数点的角速度:

——————————————线速度——————————————————
由旋转矩阵的导数可推导坐标系中的点p=[x,y,z]^T相对于原点坐标的导数
注意:这里只有旋转
$$$$结论

根据求导的法则推出,图中p1的导数为0 所以省去 R*dp,因为dp=0。
再来考虑一般情况
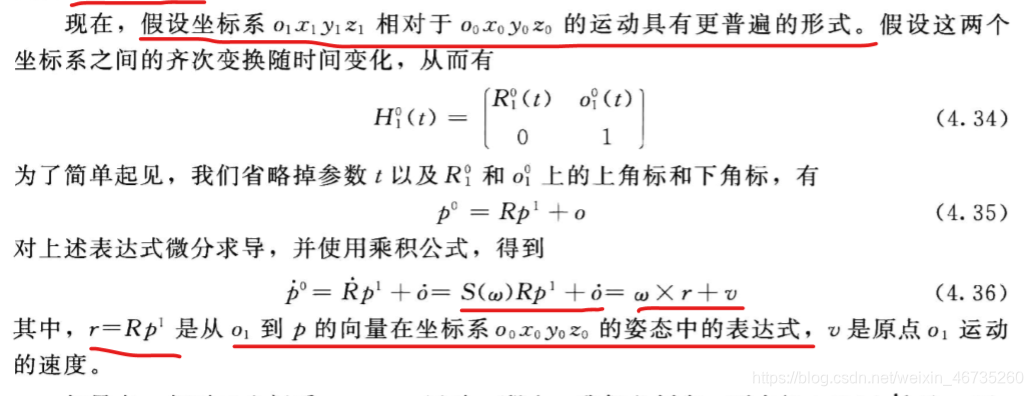
——————雅可比矩阵推导——————



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









