




粒子滤波是贝叶斯滤波的特例或是实现方式,由于滤波是估计当前的位姿和地图,不能修复之前的误差,所以随着环境地图的增大,出错的可能性越来越大,主要造成这种情况的原因是粒子耗散问题,这个问题没办法解决只能缓解,因为这个原因所以粒子滤波只能在环境比较小的时候发挥比较好的效果,环境一大就会出错。
FastSLAM是基于粒子滤波的。
极大似然估计(MLE)是指找到一个数值使得当前发生的概率达到最大。
贝叶斯估计是指我估计出我想要的数值的最大后验概率分布,然后找到概率最大值的地方。这两种情况的高斯分布情况结果是相同的
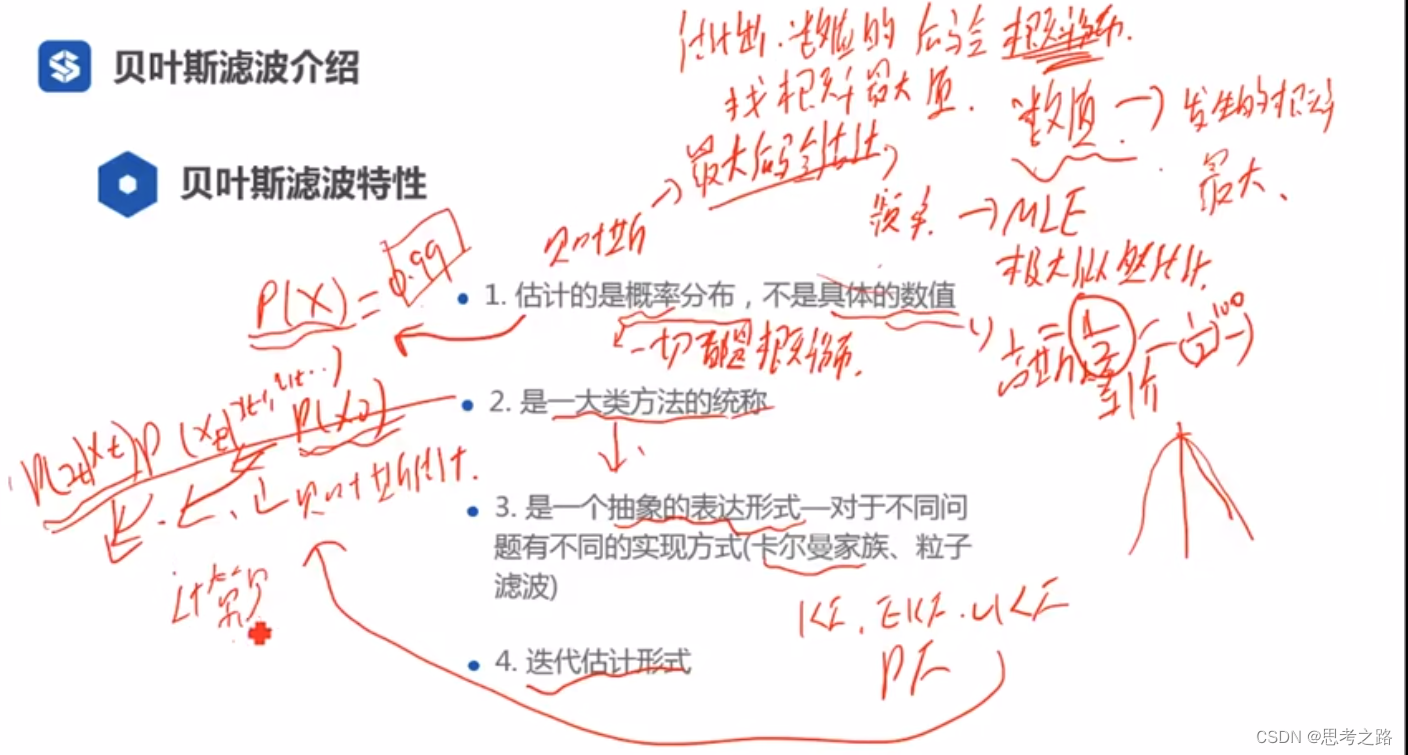
卡尔曼滤波是贝叶斯滤波高斯,线性的特例
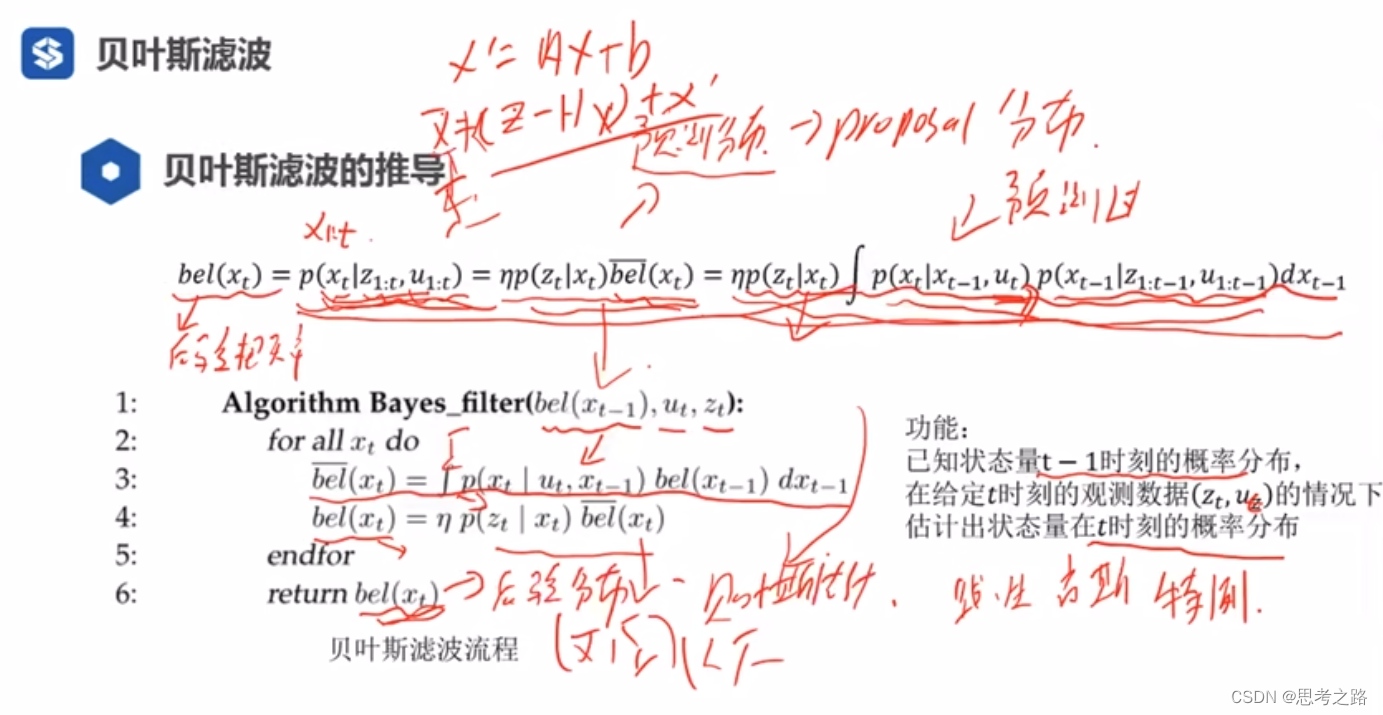
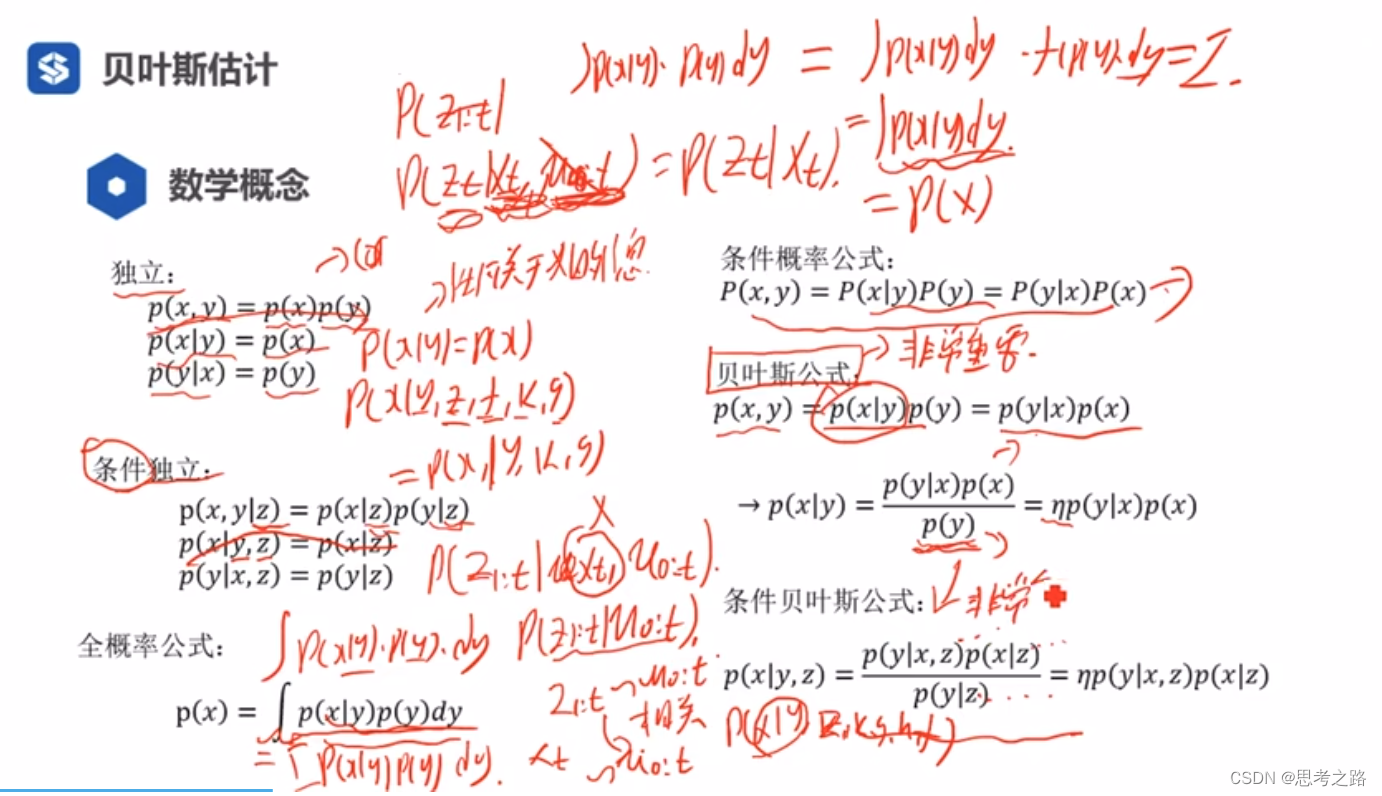
贝叶斯滤波:通过t-1时刻的概率分布预测t时刻的概率分布,然后通过t时刻的观测进行校正得到t时刻概率分布,这种方式也是迭代估计,例如已知x0时刻的概率通过迭代估计可以计算出任意时刻的概率分布。
深蓝激光slam理论与实践-第五节笔记(基于滤波器的激光slam方法(Grid-based))
 本文介绍了粒子滤波原理及其在机器人定位与建图中的应用。重点讨论了粒子滤波的特点,包括粒子耗散问题及如何缓解这一问题,以及FastSLAM等基于粒子滤波的方法。此外还对比了贝叶斯估计、极大似然估计和卡尔曼滤波等算法。
本文介绍了粒子滤波原理及其在机器人定位与建图中的应用。重点讨论了粒子滤波的特点,包括粒子耗散问题及如何缓解这一问题,以及FastSLAM等基于粒子滤波的方法。此外还对比了贝叶斯估计、极大似然估计和卡尔曼滤波等算法。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









