







项目背景
在欧洲、北美洲等地区,大量人烟稀少的地区没有信号或信号质量较差,由于基础设施建设不够完善以及环境的复杂性,对这些地方的环境实时监测成为一项难题。因此,设置无源的检测平台成为一种可行的方案。但如何从这些分布广泛的平台采集数据又成为一个难点:旋翼无人机提供了一种解决策略,即通过旋翼无人机的周期性飞行,在所有无源检测站的上空采集数据,并最终传回数据中心。
由于无人机的能源有限,想要在一定时间内完整地覆盖所有监测站存在困难,旋翼无人机的路径选择算法成为核心问题之一。可以搭建基础实验平台,在野外实验之前先进行验证。本项目的目标即是搭建模拟平台与室内无人机平台,对各种路径优化算法的性能进行直观的测试与验证,以及提出一种路径优化算法,对无人机多目标的工作路径进行进一步优化,以起到节约能源提高效率的目的。
项目目标
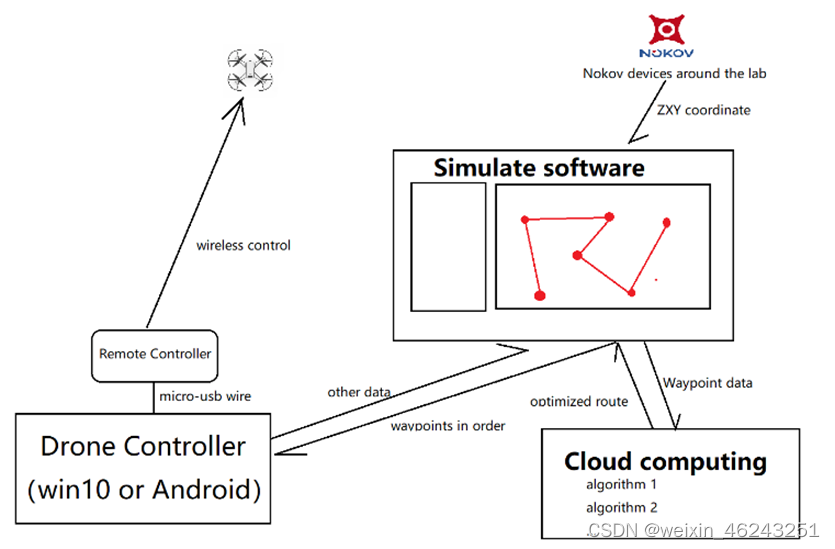
本项目旨在开发一个系统性的室内无人机实验平台,主要由前端仿真软件和无人机控制软件两部分构成,并由数据模块提供数据接口支持,由云函数提供远程调用支持,由算法模块进行路径计算工作。该项目最终需要在缺少GPS 信号的室内实验室中实现无人机在一定精度下定点飞行,按照给定的坐标序列进行航点飞行任务,并且可以多次重复该任务;控制模块也应该提供无人机的电池信息,供实验者记录飞行数据。对于前端应用,应实现坐标点输入,图形化显示,模拟路径绘制与数据提交等工作。
最终,实验者将可以在室内标记一系列航点,并输入本项目前端应用,前端应用会调用算法进行运算,并将结果以轨迹的形式返回给实验者。实验者将能够将实验路径存入科研数据库,并可以由无人机执飞实验任务,用于验证不同算法对路径寻找的优化程度。项目亦需提供进一步扩展的可能,以适应实验室空间的变化和坐标系的调整。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









