






前言
本篇日志主要是接着学习图像分割的相关算法
正文
一.基于区域选择
Regional proposal 在计算机视觉领域是一个非常常用的算法,尤其是在目标检测领域。其核心思想就是检测颜色空间和相似矩阵,根据这些来检测待检测的区域。然后根据检测结果可以进行分类预测。
在语义分割领域,基于区域选择的几个算法主要是由前人的有关于目标检测的工作渐渐延伸到语义分割的领域的。
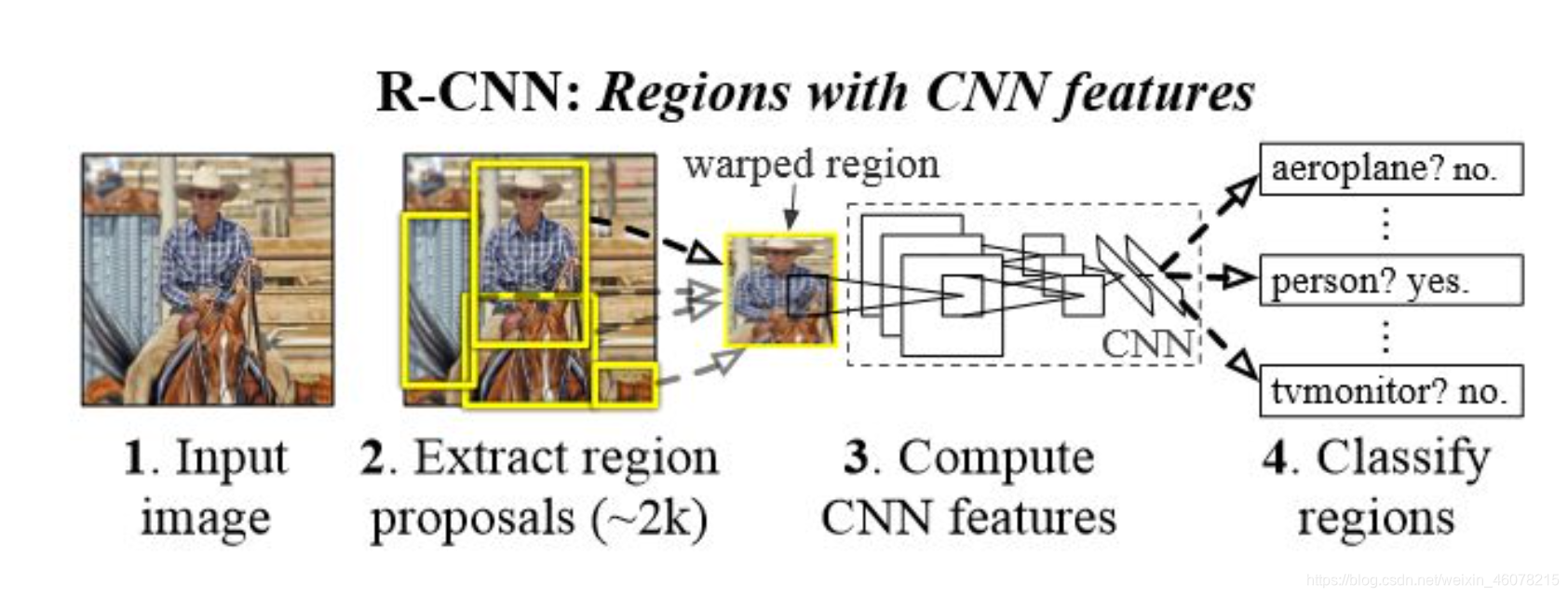
1.1 R-CNN
伯克利大学的Girshick教授等人共同提出了首个在目标检测方向应用的深度学习模型:Region-based Convolutional Neural Network(R-CNN)。该网络模型如下图所示,其主要流程为:先使用selective search算法提取2000个候选框,然后通过卷积网络对候选框进行串行的特征提取,再根据提取的特征使用SVM对候选框进行分类预测,最后使用回归方法对区域框进行修正。
R-CNN的优缺点:
-
是首个开创性地将深度神经网络应用到目标检测的算法;
-
使用Bounding Box Regression对目标检测的框进行调整;
-
由于进行特征提取时是串行,处理耗时过长;
-
Selective search算法在提取每一个region时需要2s的时间,浪费大量时间
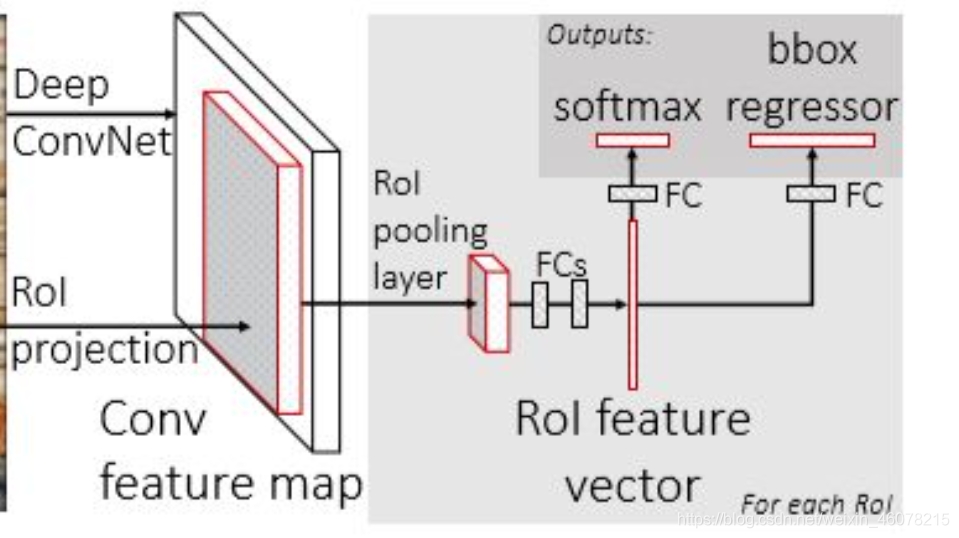
1.2 Fast R-CNN
由于R-CNN的效率太低,2015年由Ross等学者提出了它的改进版本:Fast R-CNN。其网络结构图如下图所示(从提取特征开始,略掉了region的选择)Fast R-CNN在传统的R-CNN模型上有所改进的地方是它是直接使用一个神经网络对整个图像进行特征提取,就省去了串行提取特征的时间;接着使用一个RoI Pooling Layer在全图的特征图上摘取每一个RoI对应的特征,再通过FC进行分类和包围框的修正。
Fast R-CNN的优缺点
-
节省了串行提取特征的时间;
-
除了selective search以外的其它所有模块都可以合在一起训练;
-
最耗时间的selective search算法依然存在。
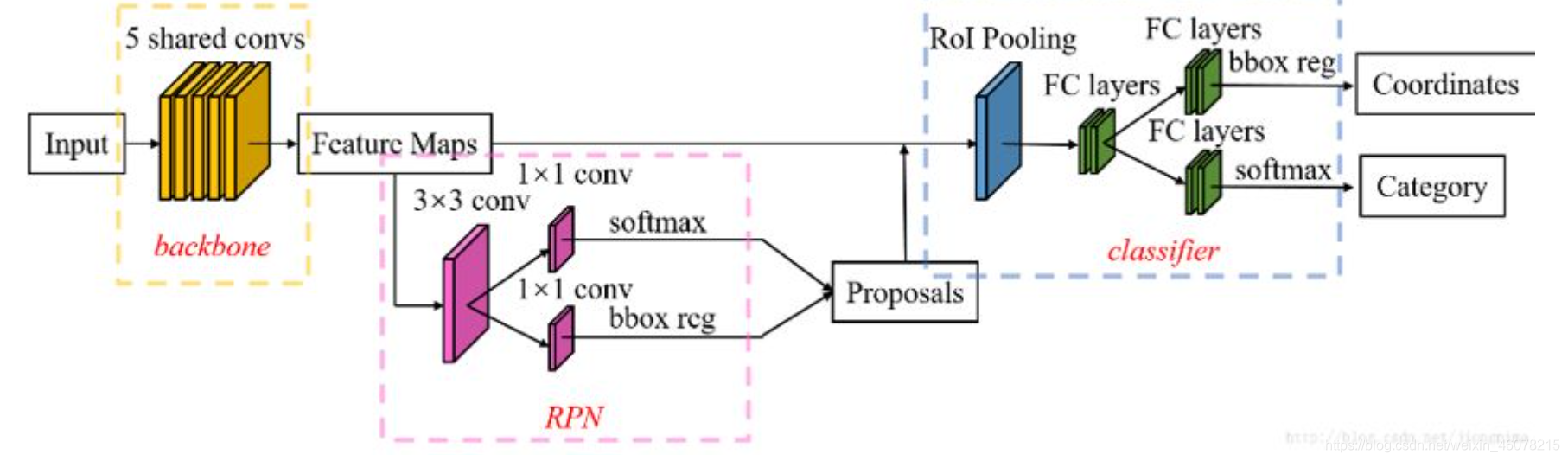
1.3 Faster R-CNN
016年提出的Faster R-CNN可以说有了突破性的进展(虽然还是目标检测哈哈哈),因为它改变了它的前辈们最耗时最致命的部位:selective search算法。它将selective search算法替换成为RPN,使用RPN网络进行region的选取,将2s的时间降低到10ms,其网络结构如下图所示:
Fast R-CNN的优缺点
-
节省了串行提取特征的时间;
-
除了selective search以外的其它所有模块都可以合在一起训练;
-
最耗时间的selective search算法依然存在。
1.4 Faster R-CNN
2016年提出的Faster R-CNN可以说有了突破性的进展(虽然还是目标检测哈哈哈),因为它改变了它的前辈们最耗时最致命的部位:selective search算法。它将selective search算法替换成为RPN,使用RPN网络进行region的选取,将2s的时间降低到10ms,其网络结构如下图所示:
结束
以上便是我的项目实训第四周第二篇日志
主要参考自https://blog.youkuaiyun.com/flyfor2013/article/details/101524511


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









