







论文名字:Deep Residual Fourier Transformation for Single Image Deblurring
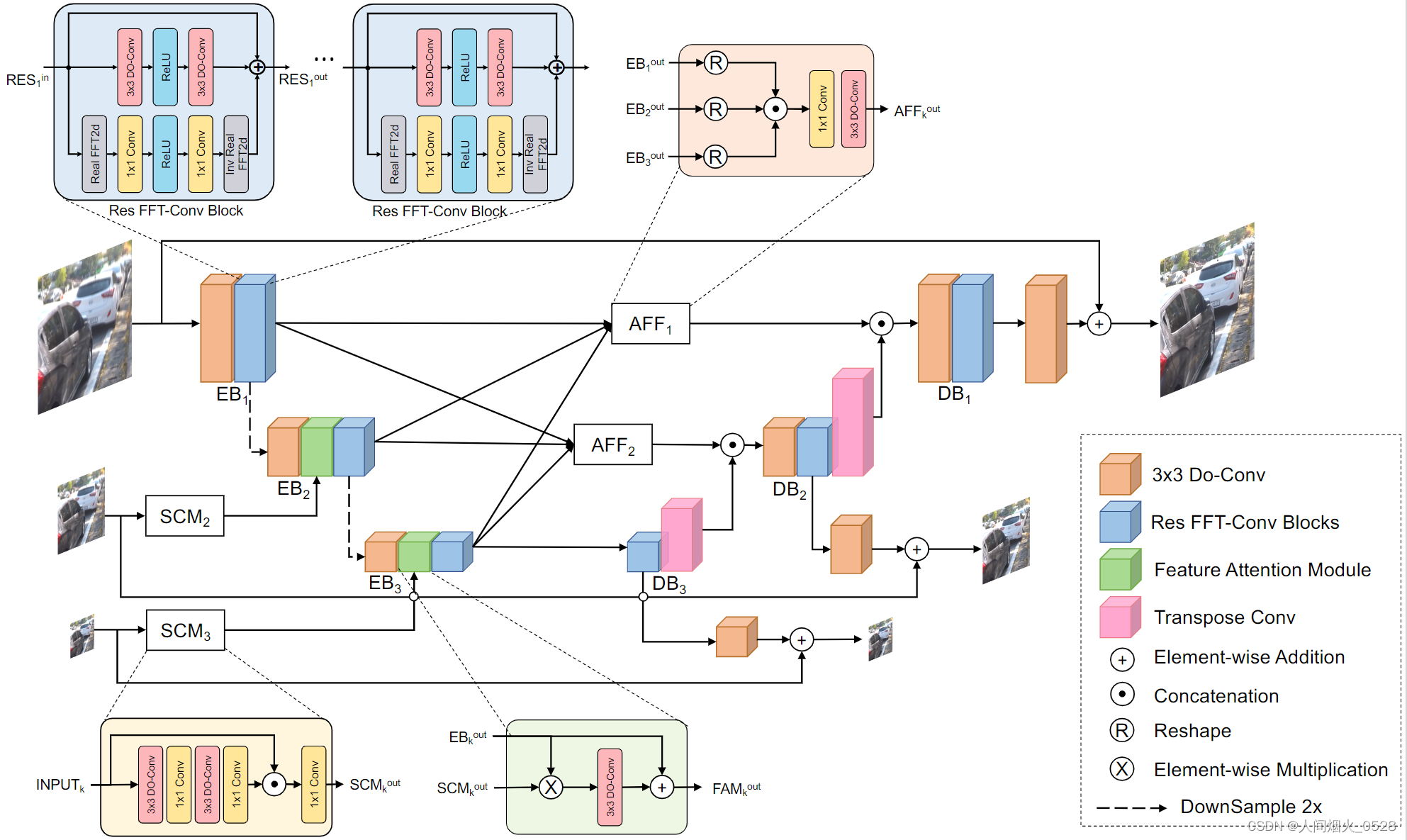
该论文中的网络是在MIMO的基础上进行的改进,提出了一种带有卷积块的残差快速傅里叶变换的网络(Res FFT-Conv Block),网络的结构图如下所示:
作者对于网络主要改进了两个地方
1.在原有残差网络的基础上增加了一个分支结构,该分支带有傅里叶变换,能够同时关注高频信息和低频信息
2.把原来的卷积模块,非1*1卷积部分都换为Do-conv
详细请查看原文
 最开始的想法是,这个网络虽然取得个很好的效果,但是是以牺牲大量的算力为代价,模型的推理速度大大降低了,所以这里考虑如何在接近实时性的情况下使效果尽可能的好,比如MIMO的效果不太好,但是推理速度小于0.008秒,速度太快造成算力冗余;该网络效果好,但是推理速度是0.3秒,距离实时性还有很长的距离,考虑如何在二者之间找平,目标是在尽可能接近实时的情况下(实时是0.03s左右),效果尽可能的好,进而取得速度和精度的平衡。
最开始的想法是,这个网络虽然取得个很好的效果,但是是以牺牲大量的算力为代价,模型的推理速度大大降低了,所以这里考虑如何在接近实时性的情况下使效果尽可能的好,比如MIMO的效果不太好,但是推理速度小于0.008秒,速度太快造成算力冗余;该网络效果好,但是推理速度是0.3秒,距离实时性还有很长的距离,考虑如何在二者之间找平,目标是在尽可能接近实时的情况下(实时是0.03s左右),效果尽可能的好,进而取得速度和精度的平衡。
这里考虑的是在DeepRFT上进行改进,在网络精度不下降太多的情况下,使的速度尽可能的快,考虑了尝试不同的残差个数对速度和精度的影响:
残差模块的个数是8个结果如下:
PSNR最高是32.66,在GoPro测试集上的测试是32.35,average_time是0.3071

残差模块的个数是4个,结果如下:
PSNR最高是32.19,在GoPro测试集上的测试是31.92,average_time是0.3226

残差模块的个数是2个,结果如下:
PSNR最高是31.49,在GoPro测试集上的测试是31.19,average_time是0.3178

残差模块的个数是1个,结果如下:
PSNR最高是30.55,在GoPro测试集上的测试是30.25,average_time是0.3242
总结:(重要)
1.更改残差模块的个数并不能大幅度的提高推理速度,不管是1个残差模块还是8个残差模块,推理时间都在0.3秒以上,距离实时性有较大距离,感觉还是应该和引入的傅里叶变换和卷积块有关
2.残差模块为1时,PSNR是30.55;残差模块为8时,PSNR是32.66,但是都在30以上,改变残差模块的个数对效果影响还是挺大的
3.目前可以改进的方向有这么两个,在MIMO上进行改,因为这个速度快,努力提升效果;第二个方向是在DeepRFT上进行改进,因为这个效果好,考虑怎么让速度快起来。更应该倾向于改MIMO提高效果,因为MIMO在结果相差不大的情况下,速度确实太快了,小于0.008秒


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









