







 文章探讨了舵机的频率和占空比对其性能的影响,WS2812灯带只亮白灯的可能原因,以及电机死区和异响的调整策略。同时提到了ESP32设备的重启问题和ESP32CAM的潜在问题,如GPIO0悬空导致的异常行为。
文章探讨了舵机的频率和占空比对其性能的影响,WS2812灯带只亮白灯的可能原因,以及电机死区和异响的调整策略。同时提到了ESP32设备的重启问题和ESP32CAM的潜在问题,如GPIO0悬空导致的异常行为。
舵机频率、占空比
频率一般在50-100Hz,越高,反应速度越快,输出力越小。
以50Hz(20ms)为例
| 角度 | 占空比 | 脉宽 |
|---|---|---|
| 0° | 2.5% | 0.5ms |
| 45° | 5.0% | 1ms |
| 90° | 7.5% | 1.5ms |
| 135° | 10.0% | 2ms |
| 180° | 12.5% | 2.5ms |
WS2812 只亮白灯
现象:STM32 通过 PWM + DMA 控制 WS2812,灯带只亮白色,小模块正常
ESP32 控制灯带和小模块均正常
分析(猜测):STM32 的控制方式肯定存在问题,可能是输出的时序不精准,小模块和灯带的 WS2812 种类不同,可能因为灯带上的 WS2812 不能忽略这部分误差。
电机死区和异响
若电机死区范围较大,想减小死区值,则可以在短时间内大占空比驱动电机,一点点调小占空。
若电机有异响,则调大pwm频率。
对%c %d的理解
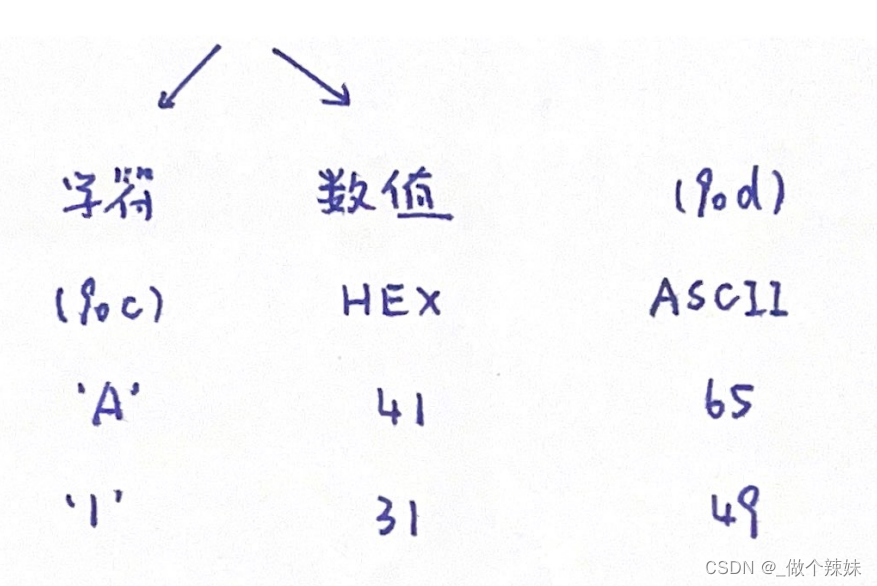 HEX 存储:31 -> 0011 0001
HEX 存储:31 -> 0011 0001
ESP32不断重启
检查供电电压!
USB-TTL 和 USB连接线的供电都不靠谱,外设一旦多起来,会导致不断重启或者运行不正常。
ESP32CAM迷惑行为
单独使用 CAM 板的时候,由于脱离了拓展板的连接,且 CAM 板暴露了 GPIO0 引脚,可能会导致各种迷惑行为(waiting for downlaod 或者串口数据异常之类的)产生,所以不要把GPIO0悬空。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









