






 本文介绍如何将乐视设备加装ROS-IMU模块并实现250Hz频率的IMU数据发布,包括MPU9250的DMP移植、STM32编程配置及IIC运行等内容。
本文介绍如何将乐视设备加装ROS-IMU模块并实现250Hz频率的IMU数据发布,包括MPU9250的DMP移植、STM32编程配置及IIC运行等内容。
乐视加装ROS—IMU变身Astra520I
说明
本品可通过ROS读取IMU下位机,发布IMU话题(包含加速度计和陀螺仪),频率可达250HZ
MPU9250权威参考
MPU9250 使用 DMP 输出姿态角:DMP 库到 STM32 平台移植笔记
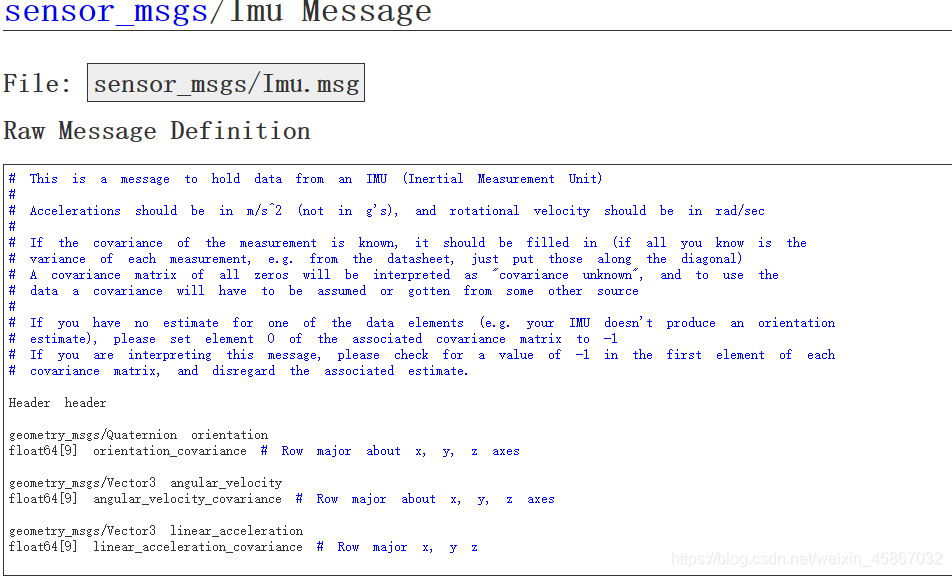
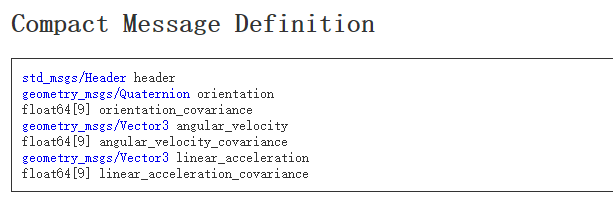
IMU消息定义
某宝ROSIMU链接
传感器:ICM20948
Github–ICM20689 DMP Driver
自检初始化参考
MPU9250和ICM20948对比
6轴官网
编程
时间戳标定
STM32编程
Cubemax配置
编程环境:
STM32F103C8T6
RTstudio
配置IIC
1.根据board.h中的指导配置
/*-------------------------- I2C CONFIG BEGIN --------------------------*/
/** if you want to use i2c bus(soft simulate) you can use the following instructions.
*
* STEP 1, open i2c driver framework(soft simulate) support in the RT-Thread Settings file
*
* STEP 2, define macro related to the i2c bus
* such as #define BSP_USING_I2C1
*
* STEP 3, according to the corresponding pin of i2c port, modify the related i2c port and pin information
* such as #define BSP_I2C1_SCL_PIN GET_PIN(port, pin) -> GET_PIN(C, 11)
* #define BSP_I2C1_SDA_PIN GET_PIN(port, pin) -> GET_PIN(C, 12)
*/
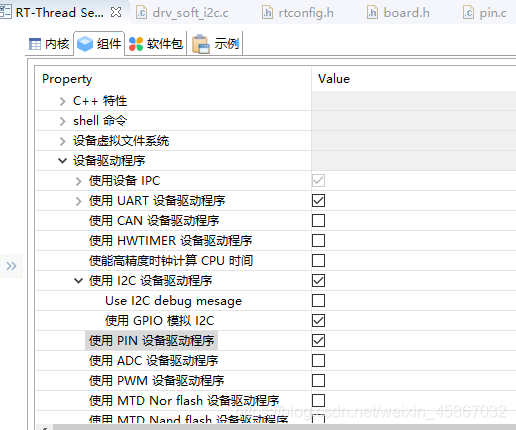
勾选使用I2C设备驱动,使用GPIO模拟I2C,使用PIN设备驱动程序三项
2.配置完成后编译
描述 资源 路径 位置 类型
'PIN_HIGH' undeclared (first use in this function) drv_soft_i2c.c /ros_9250/drivers 第 57 行 C/C++ 问题
'PIN_HIGH' undeclared (first use in this function) drv_soft_i2c.c /ros_9250/drivers 第 72 行 C/C++ 问题
'PIN_HIGH' undeclared (first use in this function) drv_soft_i2c.c /ros_9250/drivers 第 91 行 C/C++ 问题
'PIN_HIGH' undeclared (first use in this function) drv_soft_i2c.c /ros_9250/drivers 第 182 行 C/C++ 问题
'PIN_LOW' undeclared (first use in this function) drv_soft_i2c.c /ros_9250/drivers 第 76 行 C/C++ 问题
'PIN_LOW' undeclared (first use in this function) drv_soft_i2c.c /ros_9250/drivers 第 95 行 C/C++ 问题
'PIN_LOW' undeclared (first use in this function) drv_soft_i2c.c /ros_9250/drivers 第 178 行 C/C++ 问题
'PIN_MODE_OUTPUT_OD' undeclared (first use in this function) drv_soft_i2c.c /ros_9250/drivers 第 54 行 C/C++ 问题
make: *** [drivers/subdir.mk:69: drivers/drv_soft_i2c.o] Error 1 ros_9250 C/C++ 问题
'MX_TIM2_Init' defined but not used [-Wunused-function] main.c /pwm_1/applications 第 45 行 C/C++ 问题
'return' with a value, in function returning void rtdef.h /pwm_1/rt-thread/include 第 270 行 C/C++ 问题
conflicting types for 'Error_Handler' main.c /pwm_1/applications 第 102 行 C/C++ 问题
implicit declaration of function 'Error_Handler' [-Wimplicit-function-declaration] main.c /pwm_1/applications 第 94 行 C/C++ 问题
implicit declaration of function 'rt_pin_mode' [-Wimplicit-function-declaration] drv_soft_i2c.c /ros_9250/drivers 第 54 行 C/C++ 问题
implicit declaration of function 'rt_pin_read' [-Wimplicit-function-declaration] drv_soft_i2c.c /ros_9250/drivers 第 107 行 C/C++ 问题
implicit declaration of function 'rt_pin_write' [-Wimplicit-function-declaration] drv_soft_i2c.c /ros_9250/drivers 第 57 行 C/C++ 问题
variable 'sClockSourceConfig' set but not used [-Wunused-but-set-variable] main.c /pwm_1/applications 第 52 行 C/C++ 问题
variable 'sMasterConfig' set but not used [-Wunused-but-set-variable] main.c /pwm_1/applications 第 53 行 C/C++ 问题
each undeclared identifier is reported only once for each function it appears in drv_soft_i2c.c /ros_9250/drivers 第 54 行 C/C++ 问题
in expansion of macro 'RT_ERROR' pwm_test.c /pwm_1/applications 第 30 行 C/C++ 问题
previous implicit declaration of 'Error_Handler' was here main.c /pwm_1/applications 第 94 行 C/C++ 问题
MPU9250的I2C地址
MPU9250的I2C Slave地址为b110100X,其中的X是由AD0引脚的电平来决定的,这样的地址设置,可以在同一I2C总线上连接两个MPU9250的设备
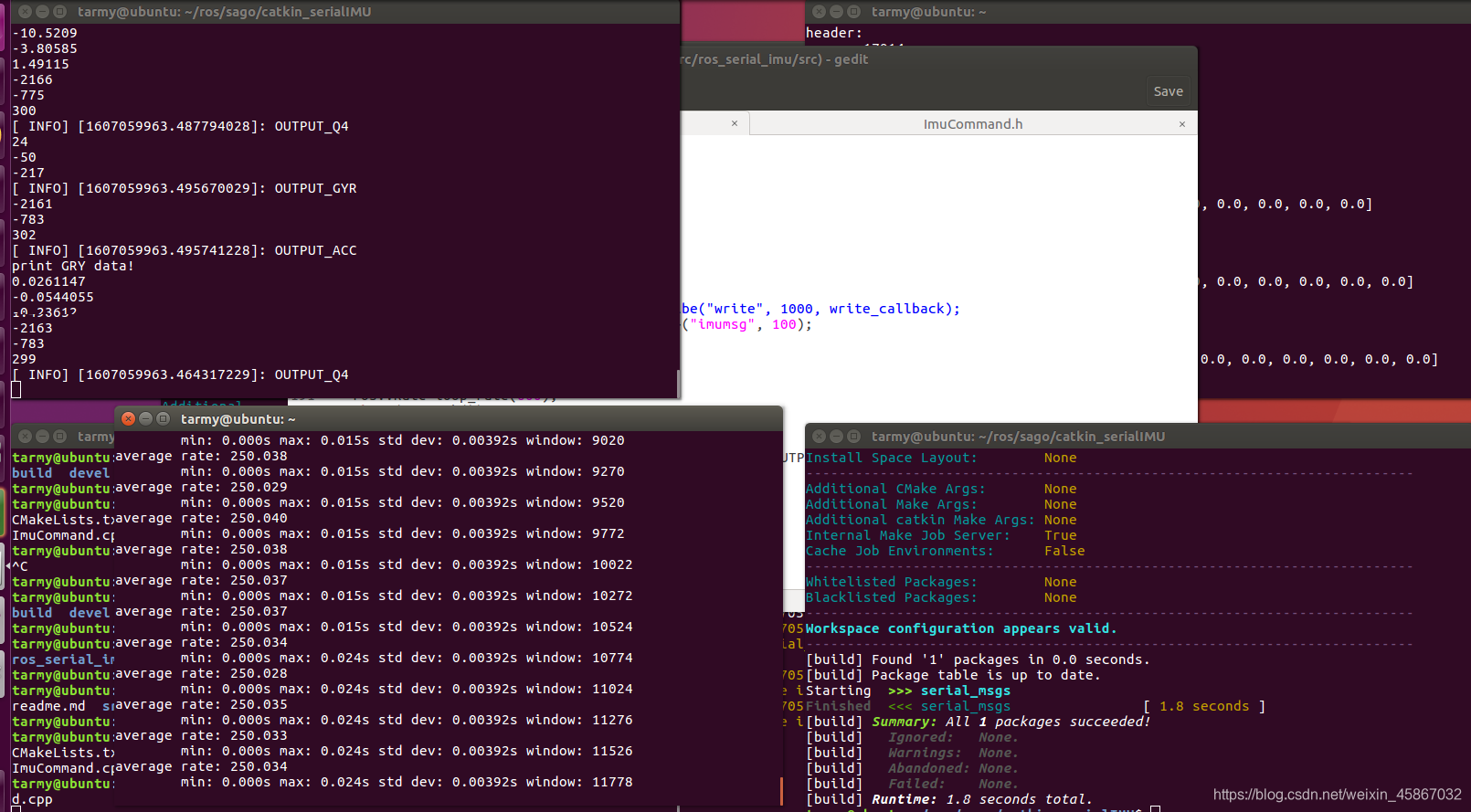
运行Serial-IMU
可执行文件
talker
listen1
serial_example_node1
rosrun serial_msgs serial_example_node1
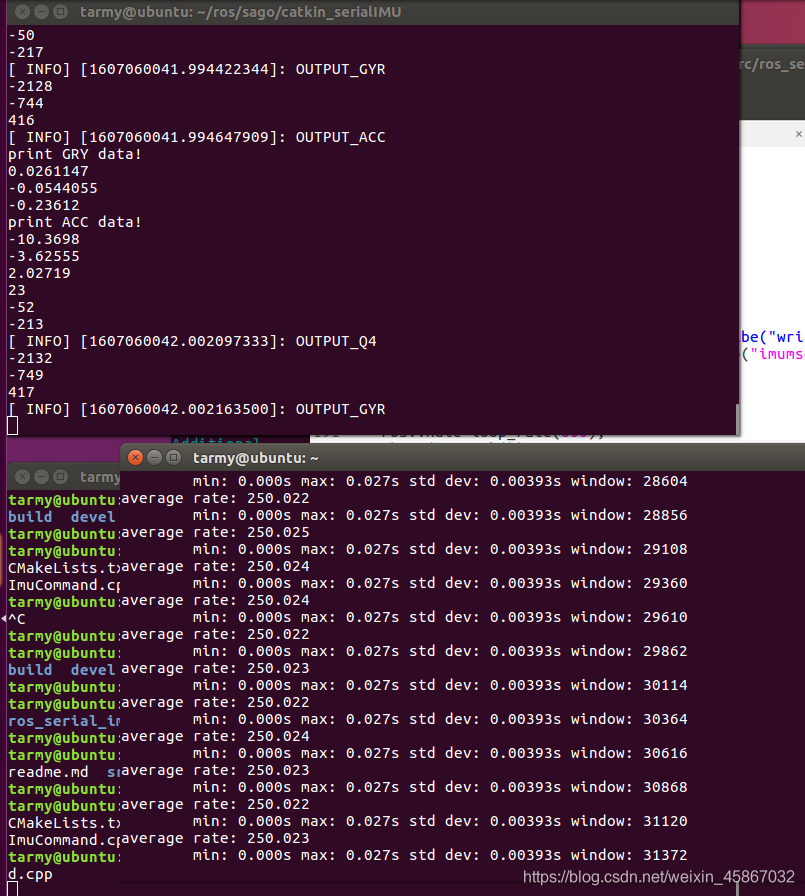
效果图如下:
发布IMU话题
从传感器16位原始数据到IMU话题的单位转换
1.陀螺仪转换
首先,确定陀螺仪量程,以-2000~+2000为例
其次,16位能表示的最大数据为FFFF,但最高位F实际为固定数7或-7,是符号位,所以16位数据表示的最大数据为7FFF,即32767,最小数据为-32767.
所以,-32767~32767对应着陀螺仪的-2000 ~ 2000.把32767除以2000,就可以得到16.40, 即我们说的灵敏度。
具体计算:例如从陀螺仪读到的数字是1000,那么对应的角速度数据是1000/16.40=61度每秒。
当采用量程为-2000到+2000的范围,把我们从陀螺仪获取的数据做如下处理,就可以用于四元数的姿态解算(用gyro_x来代表从陀螺仪读到的数据): gyro_x/(16.4057.30)=gyro_x0.001064,单位为弧度每秒。
2.加速度计转换
原理相通,故而,当加速度计量程为-16g ~16g时,灵敏度=32767÷16=2048.
具体计算:例如从加速度计读到的数字是1000,那么对应的加速度数据是1000/2048=0.49g。g为加速度的单位,重力加速度定义为1g, 等于9.8米每平方秒。
编程参考小觅
void publishImu(
const api::MotionData &data, std::uint32_t seq, ros::Time stamp) {
if (pub_imu_.getNumSubscribers() == 0)
return;
sensor_msgs::Imu msg;
msg.header.seq = seq;
msg.header.stamp = stamp;
msg.header.frame_id = imu_frame_id_;
// acceleration should be in m/s^2 (not in g's)
msg.linear_acceleration.x = data.imu->accel[0] * gravity_;
msg.linear_acceleration.y = data.imu->accel[1] * gravity_;
msg.linear_acceleration.z = data.imu->accel[2] * gravity_;
msg.linear_acceleration_covariance[0] = 0;
msg.linear_acceleration_covariance[1] = 0;
msg.linear_acceleration_covariance[2] = 0;
msg.linear_acceleration_covariance[3] = 0;
msg.linear_acceleration_covariance[4] = 0;
msg.linear_acceleration_covariance[5] = 0;
msg.linear_acceleration_covariance[6] = 0;
msg.linear_acceleration_covariance[7] = 0;
msg.linear_acceleration_covariance[8] = 0;
// velocity should be in rad/sec
msg.angular_velocity.x = data.imu->gyro[0] * M_PI / 180;
msg.angular_velocity.y = data.imu->gyro[1] * M_PI / 180;
msg.angular_velocity.z = data.imu->gyro[2] * M_PI / 180;
msg.angular_velocity_covariance[0] = 0;
msg.angular_velocity_covariance[1] = 0;
msg.angular_velocity_covariance[2] = 0;
msg.angular_velocity_covariance[3] = 0;
msg.angular_velocity_covariance[4] = 0;
msg.angular_velocity_covariance[5] = 0;
msg.angular_velocity_covariance[6] = 0;
msg.angular_velocity_covariance[7] = 0;
msg.angular_velocity_covariance[8] = 0;
pub_imu_.publish(msg);
}
动态效果运行图

ROS-IMU 250Hz运行


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









