







 本文介绍了Java并发工具中的CountDownLatch和CyclicBarrier的使用。CountDownLatch常用于一个线程等待多个线程完成,而CyclicBarrier则是一组线程之间的同步工具,允许它们一起开始某个操作。文中通过示例代码详细展示了如何使用这两个工具进行线程同步。
本文介绍了Java并发工具中的CountDownLatch和CyclicBarrier的使用。CountDownLatch常用于一个线程等待多个线程完成,而CyclicBarrier则是一组线程之间的同步工具,允许它们一起开始某个操作。文中通过示例代码详细展示了如何使用这两个工具进行线程同步。
两者的区别
- CountDownLatch 主要用来解决一个线程等待多个线程的场景
- CyclicBarrier 是一组线程之间互相等待
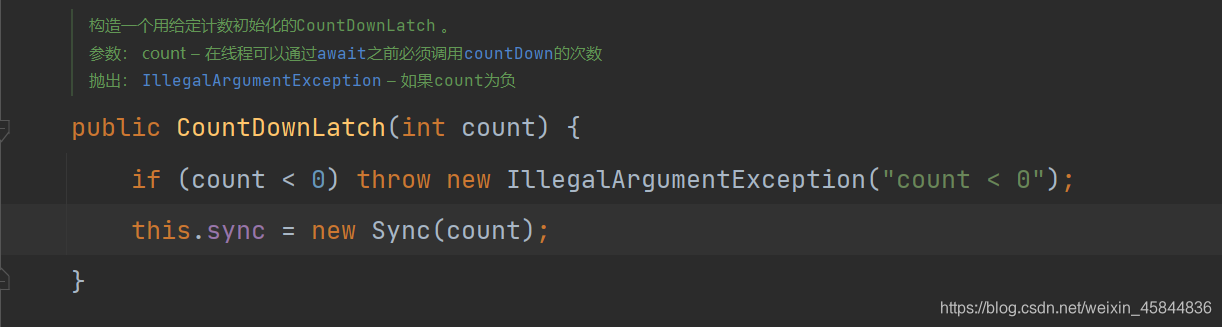
CountDownLatch
- 构造方法
- 使用demo
public static void main(String[] args) throws InterruptedException {
//创建一个 countDownLatch
CountDownLatch countDownLatch = new CountDownLatch(2);
new Thread(()->{
//计数器减一
countDownLatch.countDown();
}, "线程一").start();
new Thread(()->{
//计数器减一
countDownLatch.countDown();
}, "线程二").start();
//阻塞当前的main线程等待 countDownLatch 计数器为0 被唤醒
countDownLatch.await();
System.out.println("main线程 等到 线程一 线程二 执行完 countDownLatch.countDown() 计数器为0 main线程被唤醒");
}
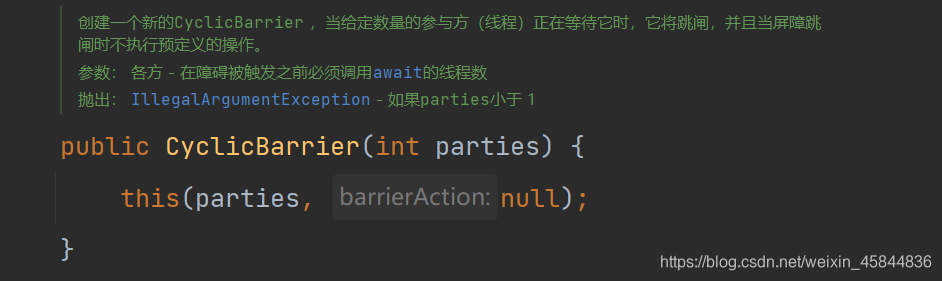
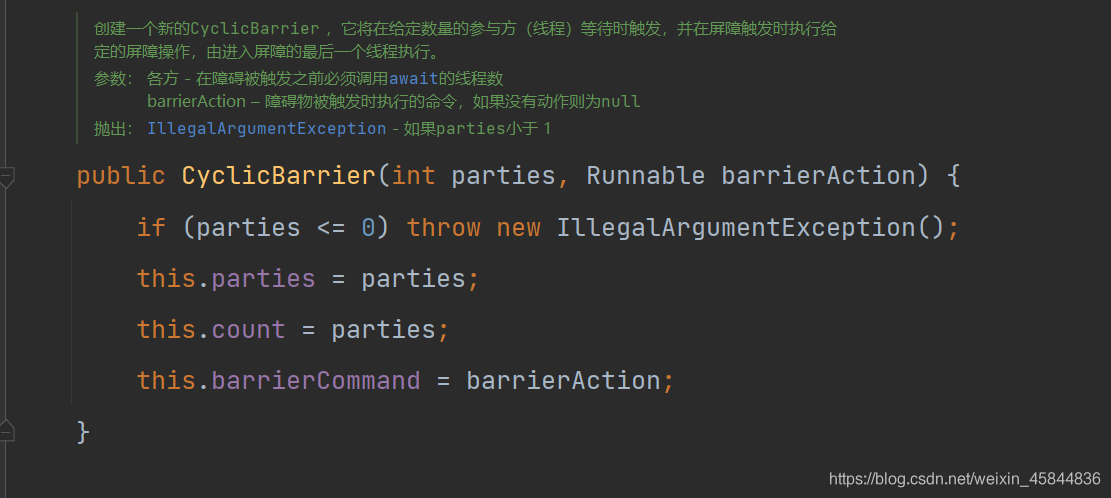
CyclicBarrier
-
两种构造方法
-
使用demo
public static void main(String[] args) throws InterruptedException {
CyclicBarrier barrier = new CyclicBarrier(3);
new Thread(()->{
try {
barrier.await();
} catch (InterruptedException e) {
e.printStackTrace();
} catch (BrokenBarrierException e) {
e.printStackTrace();
}
},"线程一");
new Thread(()->{
try {
barrier.await();
} catch (InterruptedException e) {
e.printStackTrace();
} catch (BrokenBarrierException e) {
e.printStackTrace();
}
},"线程二");
new Thread(()->{
try {
barrier.await();
} catch (InterruptedException e) {
e.printStackTrace();
} catch (BrokenBarrierException e) {
e.printStackTrace();
}
},"线程三");
System.out.println("每个线程调用到barrier.await() 会进入到等待状态,当三个线程都调用了 barrier.await(), 计数器累加 到3 突破了屏障 同步执行");
}

















 698
698

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









