







提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
一、参数服务器通信
参数服务器在ROS中主要用于实现不同节点的数据共享,类似一个公共的容器,各节点可以把数据放在该容器中,也可以看需求把用到的数据取出,共享是其最主要的特点
二、简单介绍
1.角色
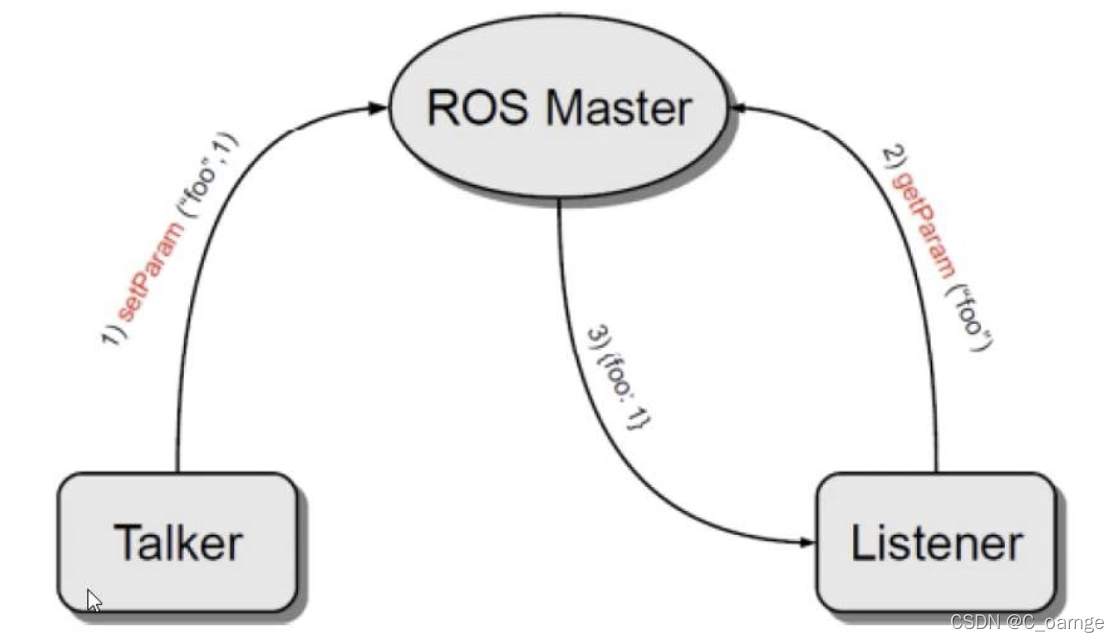
- ROS Master(数据管理者)
- Talker (参数设置者)
- Listener (参数调用者)
2.过程
- Talker通过RPC向服务器发送参数,该参数包括(参数名和参数值),ROS Master将参数保存在参数列表
- Listener通过RPC向服务器发送参数查找请求,请求含有参数名
- ROS Master通过请求中的参数名进行匹配得到参数值,然后通过RPC返回给Listener
3.参数类型
- int32
- bool
- strings
- double
- iso8601 datas(时间格式)
- list
- 字典
- base64-encoder binary data(64位编码的二进制数据)
总结
这是学习ROS过程中的一点小总结,小记录,同时也借鉴了一些其它博主的文章,若有错误,欢迎指正。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









