






1、写出扫雷程序
2、程序
#define _CRT_SECURE_NO_WARNINGS
#include <stdio.h>
#include <stdlib.h>
#include <time.h>
#define MAX_ROW 9
#define MAX_COL 9
#define MAX_mine_count 10
char mine_map[MAX_ROW][MAX_COL];
char show_map[MAX_ROW][MAX_COL];
void Init()
{
//1、首先初始化show_map地图,用*表示地图未翻开,就是刚开始全是草坪的情况
for (int row = 0; row < MAX_ROW; row++)
{
for (int col = 0; col < MAX_COL; col++)
{
show_map[row][col] = '*';
}
}
//2、首先初始化mine_map地图,首先用‘0’初始化每个位置
//其次产生随机值,将产生的随机位置复制为‘1’,表示雷的位置
for (int row = 0; row < MAX_ROW; row++)
{
for (int col = 0; col < MAX_COL; col++)
{
mine_map[row][col] = '0';
}
}
srand((unsigned int) time(0));
int mine_count = 0;
while (1)
{
//产生随机数
int row = rand() % MAX_ROW;
int col = rand() % MAX_COL;
if (mine_map[row][col] == '1')
{
continue;
}
mine_map[row][col] = '1';
mine_count++;
if (mine_count >= MAX_mine_count)
{
break;
}
}
}
//这个函数既能打印show_map,又能打印mine_map
void PrintMap(char the_map[MAX_ROW][MAX_COL])
{
for (int row = 0; row < MAX_ROW; row++)
{
for (int col = 0; col < MAX_COL; col++)
{
printf("%c ",the_map[row][col]);
}
printf("\n");
}
}
void UpdateShow_map(char mine_map[MAX_ROW][MAX_COL], int row, int col,
char show_map[MAX_ROW][MAX_COL])
{
//根据当前的位置,判断周围8个格子有几个雷,并将周围雷的个数设置在show_map中
int count = 0;//用来判断记录周围雷的个数
for (int r = row - 1; r <= row + 1; r++)
{
for (int c = col - 1; c <= col + 1; c++)
{
if (r == row && c == col)
{
continue;//当前位置不用计算,应为能输入肯定不是雷
}
if (r<0 || r>=MAX_ROW || c<0 || c>= MAX_COL)
{
continue;
}
if (mine_map[r][c] == '1')
{
count++;
}
}
}
show_map[row][col] ='0'+ count;
//把计算雷的个数设置到show_map中,不能直接将int型的数字赋值给char
//应该为'0'+count,则将count转换为字符
}
int main()
{
//1、写9*9的格子,并初始化为全*
Init();
int count=0;
while (1)
{
//2、打印地图,应该打印show_map
PrintMap(show_map);
//3、玩家输入一组坐标,表示翻开的位置(要校验合法性)
printf("玩家输入坐标:"); //用(row,col)表示
int row = 0;
int col = 0;
scanf("%d %d", &row, &col);
if (row >= MAX_ROW || row<0 || col>= MAX_COL || col < 0)
{
printf("输入有误,请重新输入!\n");
continue;
}
if (show_map[row][col] != '*')
{
printf("该位置已经翻开,请重新输入!");
continue;
}
//4、判断是否踩雷
if (mine_map[row][col] == '1')
{
PrintMap(mine_map);
printf("Game Over!\n");
break;
}
//5、如果未踩雷,判断游戏是否胜利(胜利标准为:翻开所有不是雷的位置)
count++;
//用来记录翻开位置不是雷的个数
if (count == MAX_ROW*MAX_COL - MAX_mine_count)
{
PrintMap(mine_map);
printf("恭喜您,游戏胜利!\n");
break;
}
//6、根据周末雷的情况更新show_map
UpdateShow_map(mine_map, row, col,show_map);
//7、回到步骤2
}
system("pause");
return 0;
}
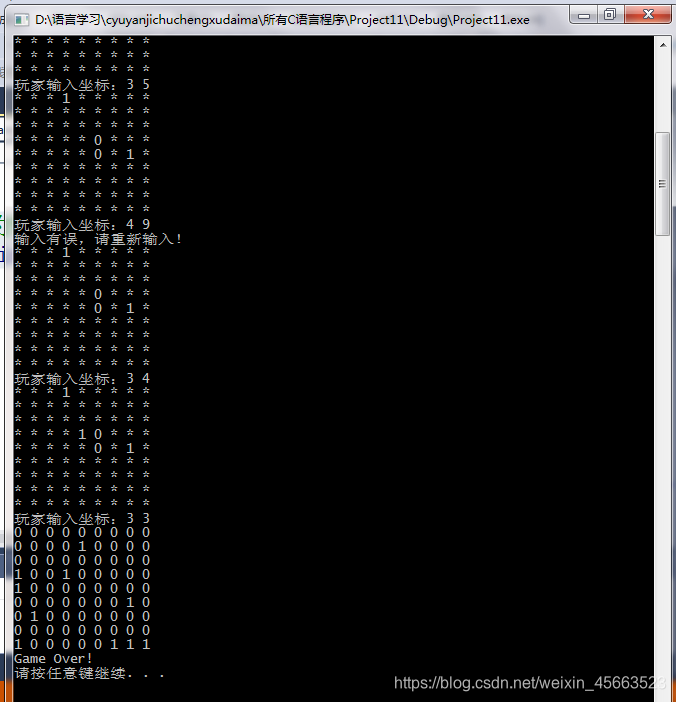
3、结果

















 722
722

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









