 远程等离子体源技术解析
远程等离子体源技术解析







知识星球(星球名:芯片制造与封测技术社区,星球号:63559049)里的学员问:远程等离子体源(RPS)是什么?有什么优势?
许多高端,先进的刻蚀,清洗机台都会配置远程等离子体源(RPS)。如Applied Materials Centura,Lam Research Kiyo都会用到RPS。
RPS的原理是什么?
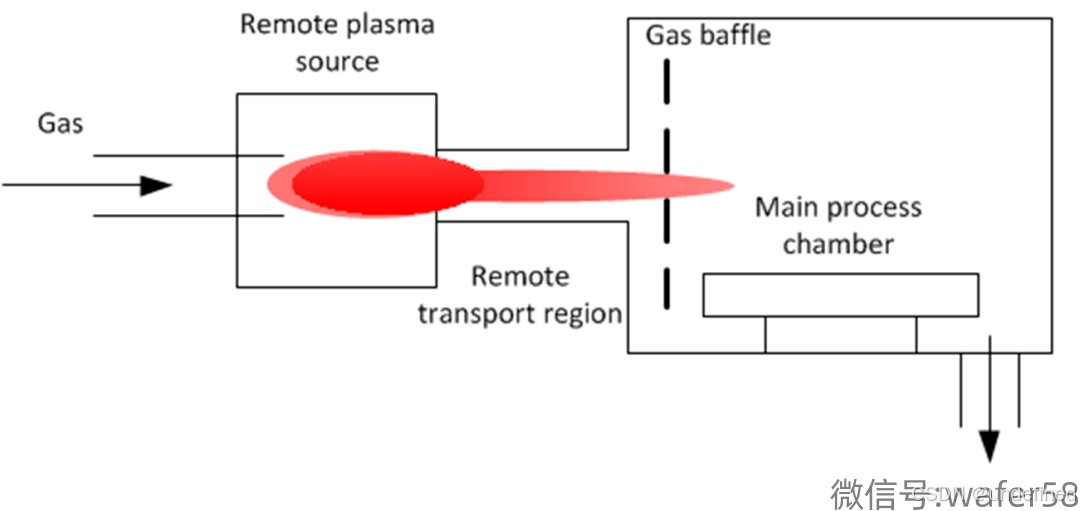
如上图,
1. Gas
气体:,输入的气体源,通常是惰性气体或工艺气体,用于生成等离子体。
2. Remote Plasma Source
远程等离子体源,这是生成等离子体的区域,等离子体在这个远离主处理腔的区域内生成。等离子体源可以通过射频或微波来激发气体,形成等离子体。
3. Remote Transport Region
远程传输区域,这是等离子体从远程源传输到主处理腔的通道。等离子体中的活性粒子在这个区域内被输送到主处理腔,而高能离子被滤除,以减少对处理表面的物理损伤。
4. Gas Baffle
气体挡板,它可以帮助均匀分布等离子体中的活性种,并进一步减少高能离子的影响,确保主处理腔内的刻蚀或清洗过程均匀且可控。
5. Main Process Chamber
主工艺腔,这是实际进行刻蚀、沉积或清洗的区域。经过气体挡板处理后的等离子体活性种在这个腔体内与晶圆表面反应,完成预定的工艺步骤。
6. Vacuum Pump
真空泵,用于维持处理腔内的低压环境。真空泵排出反应副产物和残余气体.
RPS的优势?
1,由于高能离子在到达主处理腔前已被滤除,减少了对材料表面的物理损伤。
2,具有高选择性,适用于复杂结构。
3,提高工艺均匀性。

















 518
518

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









