



文章目录
一、相机标定原理
1.1 切向畸变与径向畸变
相机标定是标定图像产生的畸变,畸变的类型主要有一下三种:
①径向畸变是由透镜本身的制造误差造成的
②切向畸变是由于透镜安装与“图像”平面不平行产生的
③焦距和主点(焦距影响图像的模糊程度,主点影响位置的偏移)
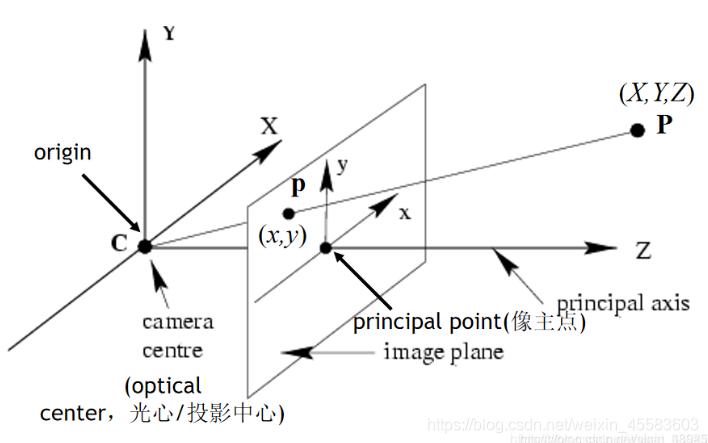
下图为小孔成像模型
1.2 张氏标定法
”张正友标定法” 是指张正友教授1998年提出的单平面棋盘格的摄像机标定方法。文中提出的方法介于传统标定法和自标定法之间,但克服了传统标定法需要的高精度标定物的缺点。相对于自标定而言,提高了精度,便于操作。因此张正友标定法被广泛应用于计算机视觉方面。
算法描述:
1、打印一张模板并贴在一个平面上;
2、从不同角度拍摄若干张模板图像;
3、检测出图像中的特征点;
4、求出摄像机的内参数和外参数;
5、求出畸变系数;
6、优化求精。
1.3 步骤
1、计算单应性矩阵H
单应性:在计算机视觉中被定义为一个平面到另一个平面的投影映射。首先确定,图像平面与标定物棋盘格平面的单应性。
设三维世界坐标的点为 ,二维相机平面像素坐标为
,二维相机平面像素坐标为 ,所以标定用的棋盘格平面到图像平面的单应性关系为:
,所以标定用的棋盘格平面到图像平面的单应性关系为: 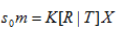 (其中,K为相机的内参矩阵,R为外部参数矩,K为相机的内参矩阵,R为外部参数矩阵(旋转矩阵),T为平移向量。令
(其中,K为相机的内参矩阵,R为外部参数矩,K为相机的内参矩阵,R为外部参数矩阵(旋转矩阵),T为平移向量。令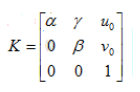 ,设棋盘格位于Z=0的平面,定义旋转矩阵R的第i列为 ri, 则有:
,设棋盘格位于Z=0的平面,定义旋转矩阵R的第i列为 ri, 则有: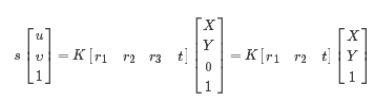
于是空间到图像的映射可改为:H=λK[r1 r2 t]
其中H 是描述Homographic矩阵,可通过最小二乘,从角点世界坐标到图像坐标的关系求解。
2、计算内参数矩阵
根据步骤1中的式子,令 H 为 H = [h1 h2 h3],则 [h1 h2 h3]=λK[r1 r2 t],再根据正交和归一化的约束可以得到等式: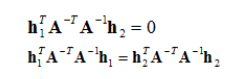
即每个单应性矩阵能提供两个方程,而内参数矩阵包含5个参数,要求解,至少需要3个单应性矩阵。为了得到三个不同的单应性矩阵,我们使用至少三幅棋盘格平面的图片进行标定。通过改变相机与标定板之间的相对位置来得到三个不同的图片。为了方便计算,我们定义: 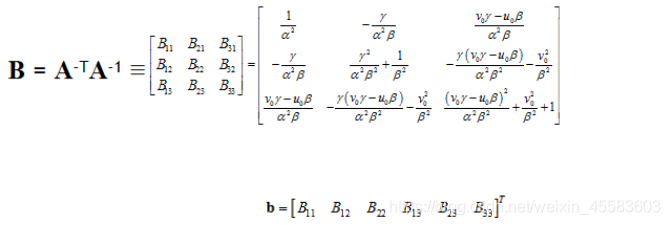
B 中的未知量可表示为6D 向量 b,
设H中的第i列为 hi ,,根据b的定义,可以推导出公式,
,,根据b的定义,可以推导出公式,
 ,最后推导出
,最后推导出
通过上式,我们可知当观测平面 n ≥ 3 时,即至少3幅棋盘格图像,可以得到b的唯一解,求得相机内参数矩阵K。
3、计算外参数矩阵
外部参数可通过Homography求解,由 H = [h1 h2 h3] = λA[r1 r2 t],可推出

4、最大似然估计
上述的推导结果是基于理想情况下而言,但由于可能存在一些其他干扰,所以使用最大似然估计进行优化。假设拍摄了n张棋盘格图像,每张图像有m个角点。最终获得的最大似然估计公式为
二、实验
2.1棋盘环境
运行环境:pyhton2.7、pycharm编译器
测试条件:手机拍照(图像16张)、手机型号iphonex
2.2 实验数据集

2.3 实现代码
import cv2
import numpy as np
import glob
# 设置寻找亚像素角点的参数,采用的停止准则是最大循环次数30和最大误差容限0.001
criteria = (cv2.TERM_CRITERIA_MAX_ITER | cv2.TERM_CRITERIA_EPS, 30, 0.001)
# 获取标定板角点的位置
objp = np.zeros((4 * 6, 3), np.float32)
objp[:, :2] = np.mgrid[0:6, 0:4].T.reshape(-1, 2) # 将世界坐标系建在标定板上,所有点的Z坐标全部为0,所以只需要赋值x和y
obj_points = [] # 存储3D点
img_points = [] # 存储2D点
images = glob.glob("C:/qipan/*.png")
i=0;
for fname in images:
img = cv2.imread(fname)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
size = gray.shape[::-1]
ret, corners = cv2.findChessboardCorners(gray, (6, 4), None)
#print(corners)
if ret:
obj_points.append(objp)
corners2 = cv2.cornerSubPix(gray, corners, (5, 5), (-1, -1), criteria) # 在原角点的基础上寻找亚像素角点
#print(corners2)
if [corners2]:
img_points.append(corners2)
else:
img_points.append(corners)
cv2.drawChessboardCorners(img, (6, 4), corners, ret) # 记住,OpenCV的绘制函数一般无返回值
i+=1;
cv2.imwrite('conimg'+str(i)+'.jpg', img)
cv2.waitKey(1500)
print(len(img_points))
cv2.destroyAllWindows()
# 标定
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(obj_points, img_points, size, None, None)
print("ret:", ret)
print("mtx:\n", mtx) # 内参数矩阵
print("dist:\n", dist) # 畸变系数 distortion cofficients = (k_1,k_2,p_1,p_2,k_3)
print("rvecs:\n", rvecs) # 旋转向量 # 外参数
print("tvecs:\n", tvecs ) # 平移向量 # 外参数
print("-----------------------------------------------------")
img = cv2.imread(images[2])
h, w = img.shape[:2]
newcameramtx, roi = cv2.getOptimalNewCameraMatrix(mtx,dist,(w,h),1,(w,h))#显示更大范围的图片(正常重映射之后会删掉一部分图像)
print (newcameramtx)
print("------------------使用undistort函数-------------------")
dst = cv2.undistort(img,mtx,dist,None,newcameramtx)
x,y,w,h = roi
dst1 = dst[y:y+h,x:x+w]
cv2.imwrite('calibresult3.jpg', dst1)
print("方法一:dst的大小为:", dst1.shape)
2.4 实验结果
2.4.1 内参结果
由结果可得iphonex后置摄像头的参数矩阵为:

2.4.2 外参结果
1、旋转向量
2、平移向量
三、实验小结
1、通过反投影误差,我们可以来评估结果的好坏。越接近0,说明结果越理想。通过之前计算的内参数矩阵、畸变系数、旋转矩阵和平移向量,使用cv2.projectPoints()计算三维点到二维图像的投影,然后计算反投影得到的点与图像上检测到的点的误差,最后计算一个对于所有标定图像的平均误差,这个值就是反投影误差。
2、
由上图结果可看出,焦距fx=2.11,及fy=2.05(约等于)。
3、intrinsics_parm为内参,一个相机只有一个内参,distortionk为畸变系数K,extrinsics_parm为外参数,因为拍摄角度的不同所以每一张的外参也不相同,有12张图片就有12个外参。
4、在这里,要注意的是所使用的图片要先转为灰度图再运行,因为原图所占空间较大怕影响处理速度,而且图片若是不经过比例压缩会导致图像变形,方格就没那么精确,结果也会有较大的偏差。


















 1191
1191

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









