






Robotics:Mobility
今天开始第三个板块:mobility
week1 motivation & background
其实主要讲生物界的移动,对比到机器人中。
Focus on Legs
Leg are better than wheels
–directiong ground reaction forces
–self-manipulation
–proprioception
Management of Energy
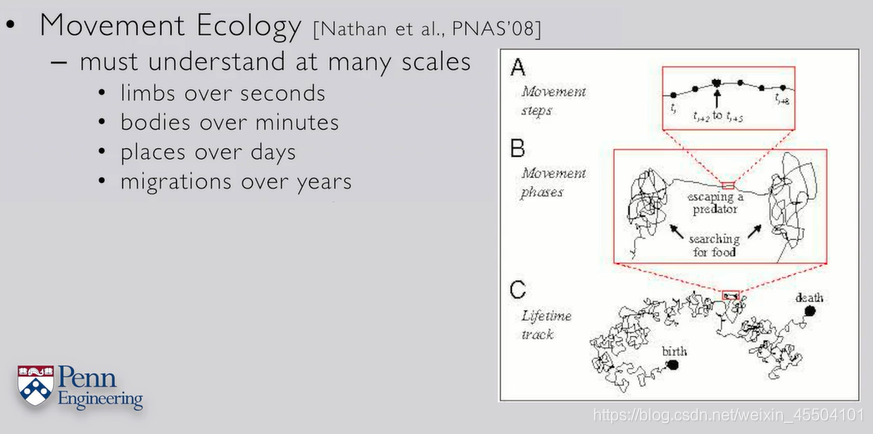
第一周主要是分析生物的运动:理由,怎么运动,为什么不运动,以及肢体结构
接下来要分析的是机器运动
这个老师说话特别快,我有点跟不上~
week2 components of mobile robots
behavioral and physical components
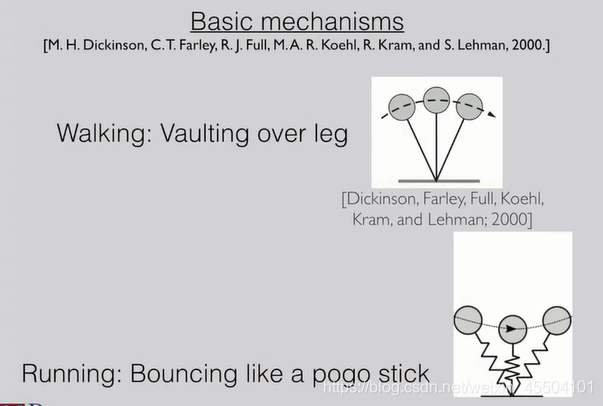
2.1.walk like a rimless wheel
生物运动涉及到的变量非常多,建模很复杂,如果简化又不能得到理想的墨香,因此为了平衡,建模运动
Template:Represents the simplest model needed to describe the targrt behavior
Anchor:More elaborate models that incorporate degrees of freedom(legs,body segments)of physical system
1、legged locomotion is fundamentally and energetically a dissipative process
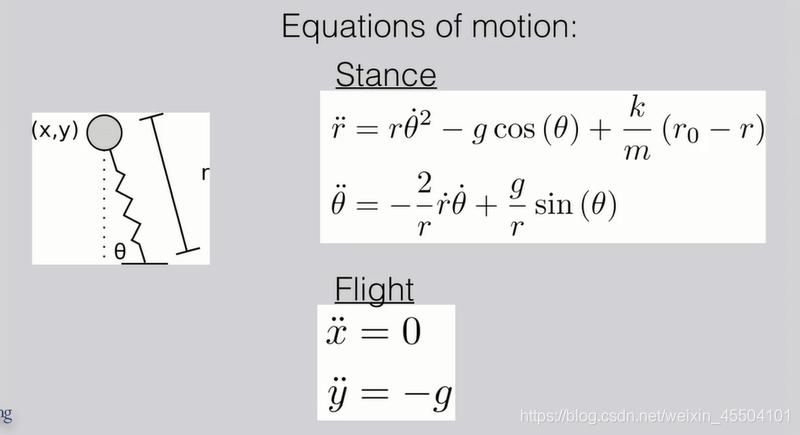
2.2.running like a spring load pendulum
why run:因为速度快的时候walk满足不了需要
The Spring Loaded Inverted Pendulum(SLIP)template


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









