






一、安装annaconda
annaconda 安装链接 https://www.anaconda.com/download/
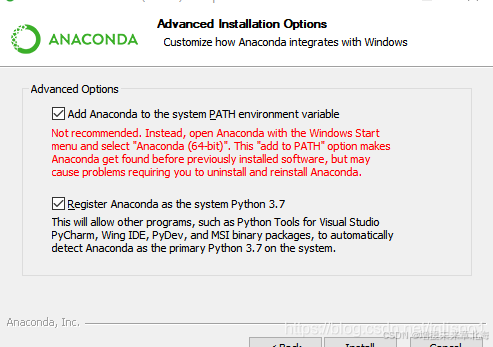
一直点 下一步
注意这里勾选环境变量
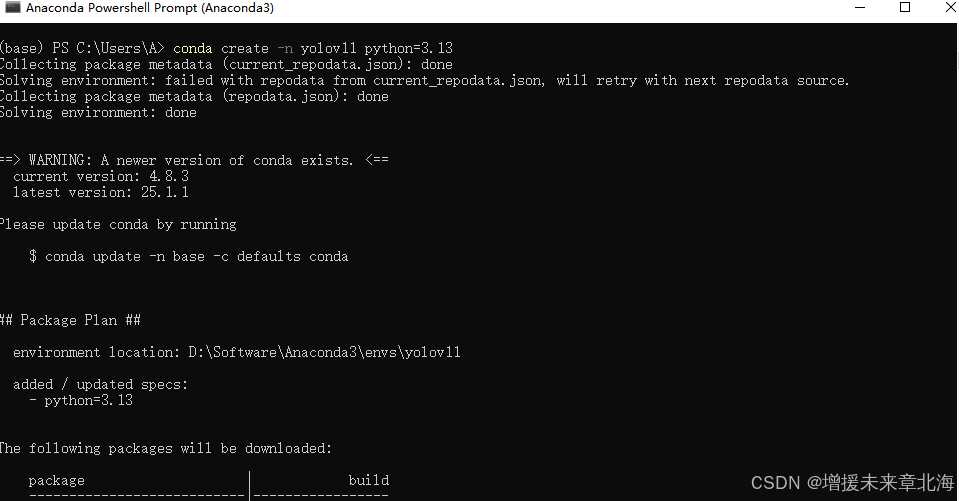
二、conda 创建环境
使用命令 conda create -n yolov11 python=3.13
三、查看环境
conda env list
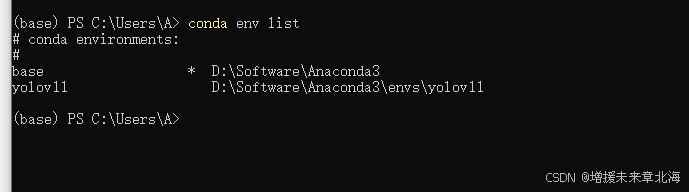
切换环境 conda activate yolov11
四、下载PyCharm 和 yolo源码导入项目
PyCharm 下载社区版的就行 https://www.jetbrains.com/pycharm/download/?section=windows#section=windows

yolo地址 https://github.com/ultralytics/ultralytics.git
五、PyCharm配置
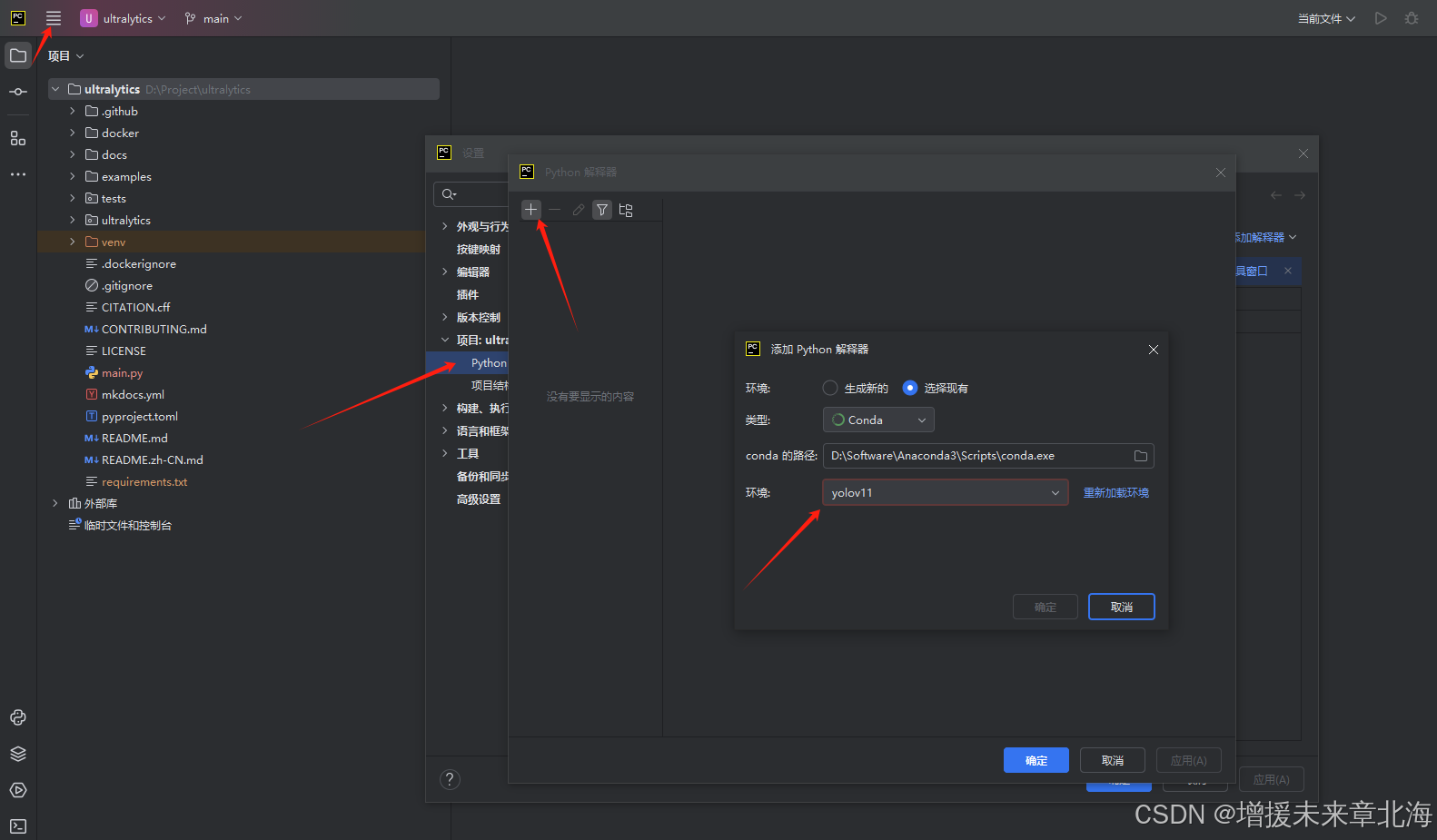
配置 conda 环境 显示 找不到Conda环境
解决方法
1.点击上面的Virtualenv 环境
2.环境选择现有
3.解释器的目录选择Anaconda所在目录\envs\目标环境\python.exe
六、安装环境
切换到yolo11
pip install requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple

















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









