







 本文详细介绍了ROS中的TF坐标变换功能包,包括其用途、实现方法及应用实例。通过广播和监听TF变换,实现了不同坐标系间的转换,并通过小海龟跟随实验、tf_echo和rviz工具展示了实际操作。
本文详细介绍了ROS中的TF坐标变换功能包,包括其用途、实现方法及应用实例。通过广播和监听TF变换,实现了不同坐标系间的转换,并通过小海龟跟随实验、tf_echo和rviz工具展示了实际操作。
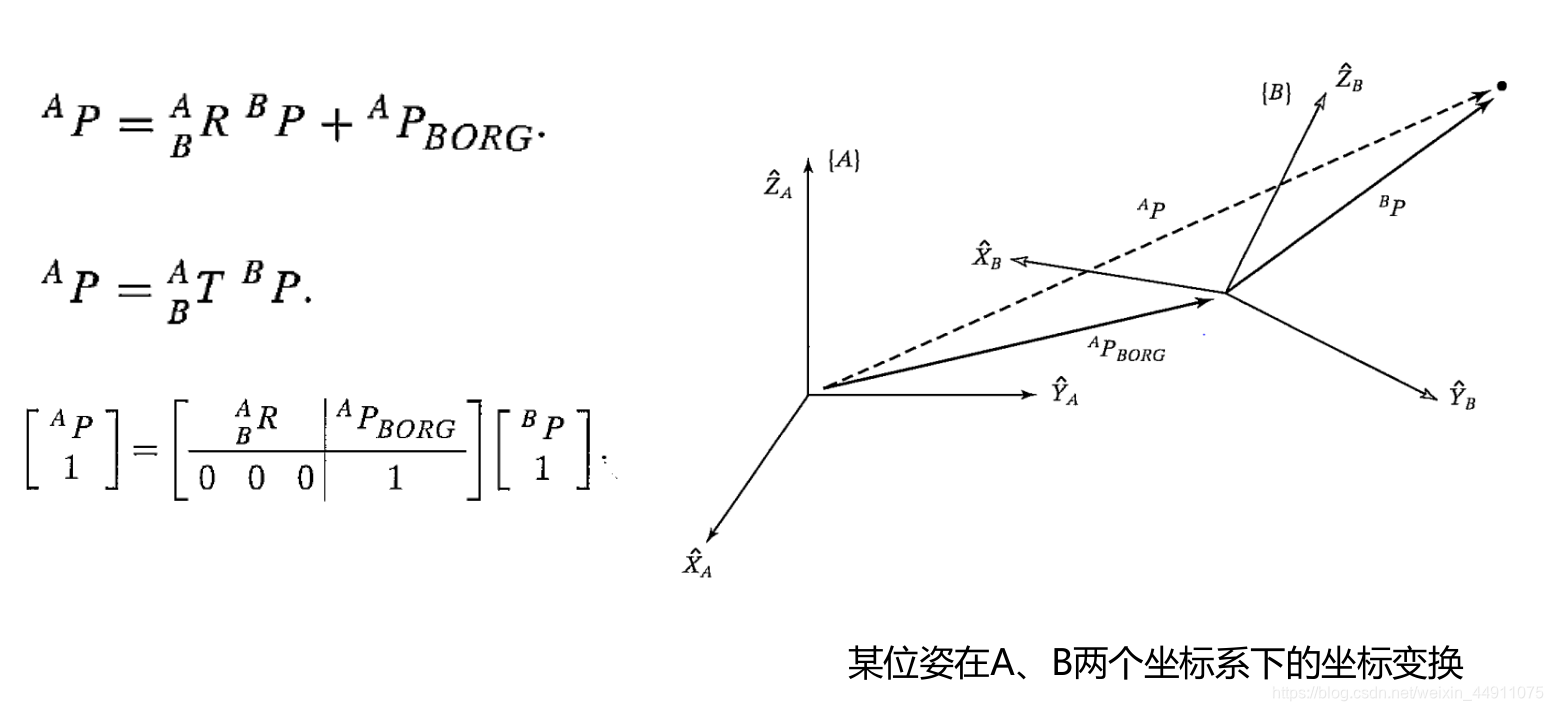
机器人中的坐标变换
 开学这学期就要学机器人学导论,现在还看不太懂hhh。
开学这学期就要学机器人学导论,现在还看不太懂hhh。
TF功能包能干什么?
- 五秒钟之前,机器人头部坐标系相对于全局坐标系的关系是什么样的?
- 机器人夹取的物体相对于机器人中心坐标系的位置在哪里?
- 机器人中心坐标系相对于全局坐标系的位置在哪?
TF坐标变换如何实现?
- 广播TF变换
- 监听TF变换
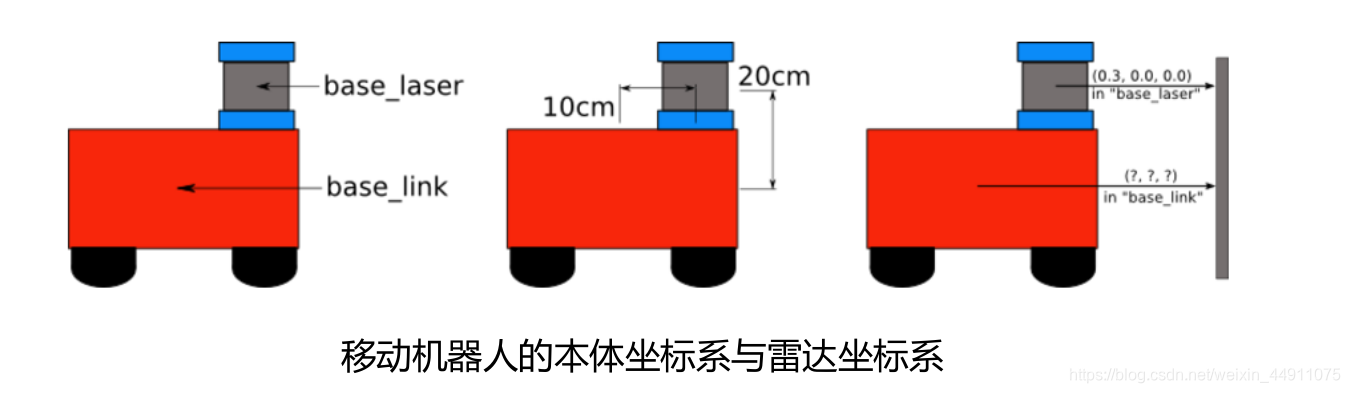
base_link,以机器人底盘上一点建立的坐标系,本体坐标系
base_laser,激光雷达所在的坐标系,雷达坐标系
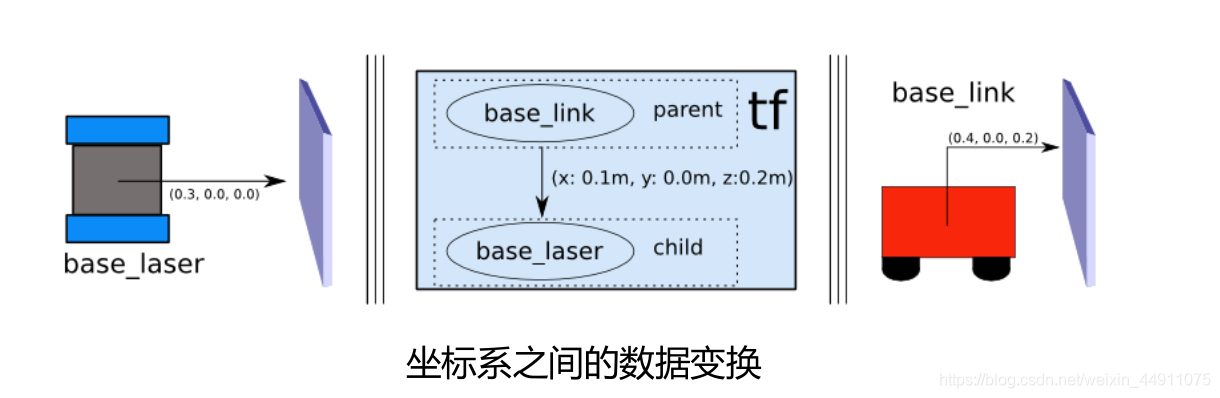
如何将激光雷达坐标系下的(0.3, 0.0, 0.0)变换到机器人本体坐标系下,这一过程,就可以通过TF来完成
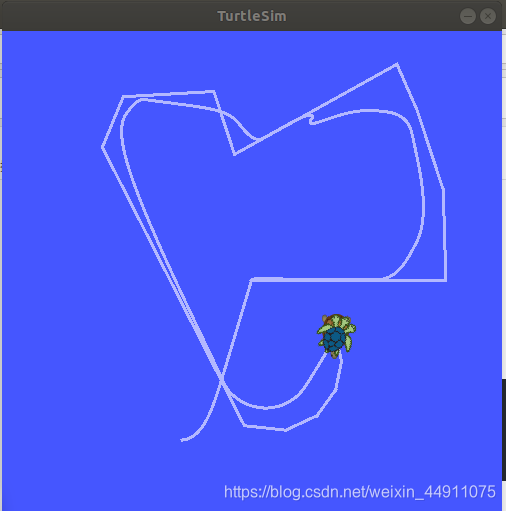
小海龟跟随实验
使一只海龟的位置始终与另一只保持一致,跟随做同步运动。
$ sudo apt-get install ros-melodic-turtle-tf
$ roslaunch turtle_tf turtle_tf_demo.launch
$ rosrun turtlesim turtle_teleop_key
$ rosrun tf view_frames
上面这个功能包一般在ROS安装的时候就自动安装过。
运行结果:
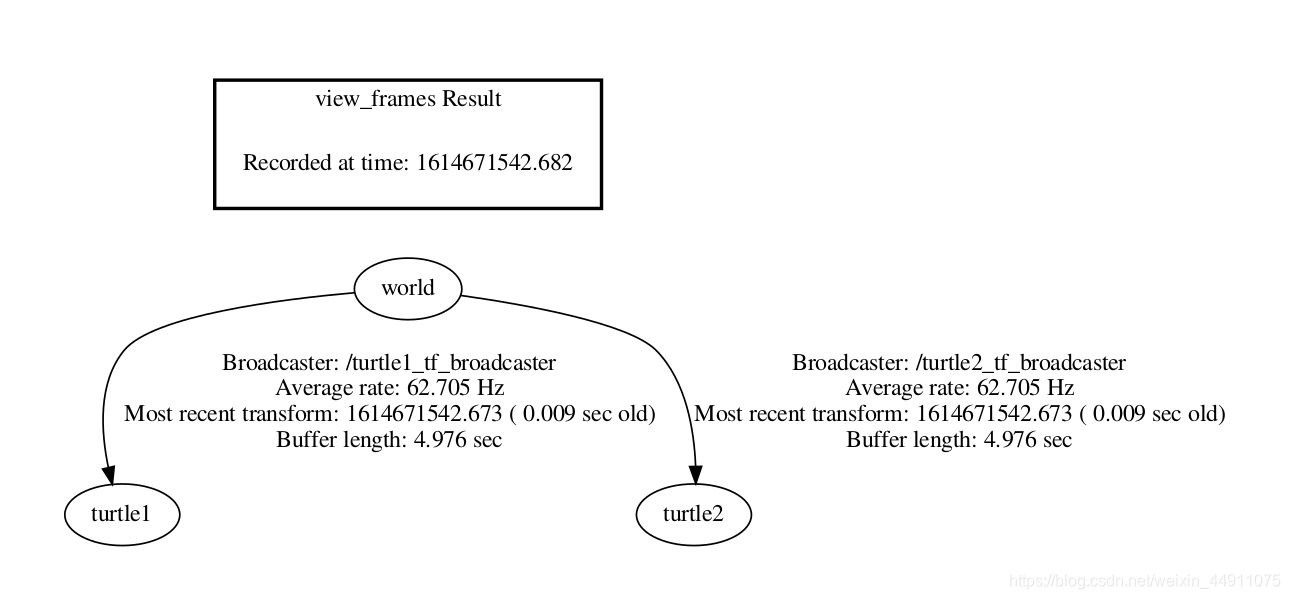 其中当前系统内一共有三个坐标系,world全局坐标系,turtle1,2位于两个海龟上的坐标系。
其中当前系统内一共有三个坐标系,world全局坐标系,turtle1,2位于两个海龟上的坐标系。
tf_echo工具
$ rosrun tf tf_echo turtle1 turtle2
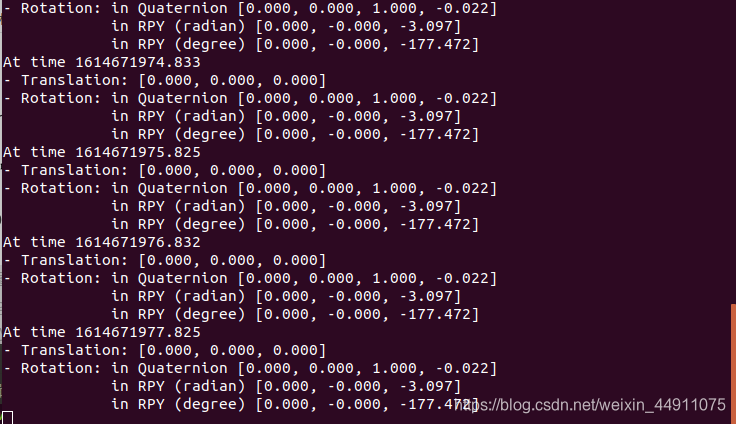
会实时动态的显示两个坐标系的关系。
平移,旋转(四元数,弧度,角度)
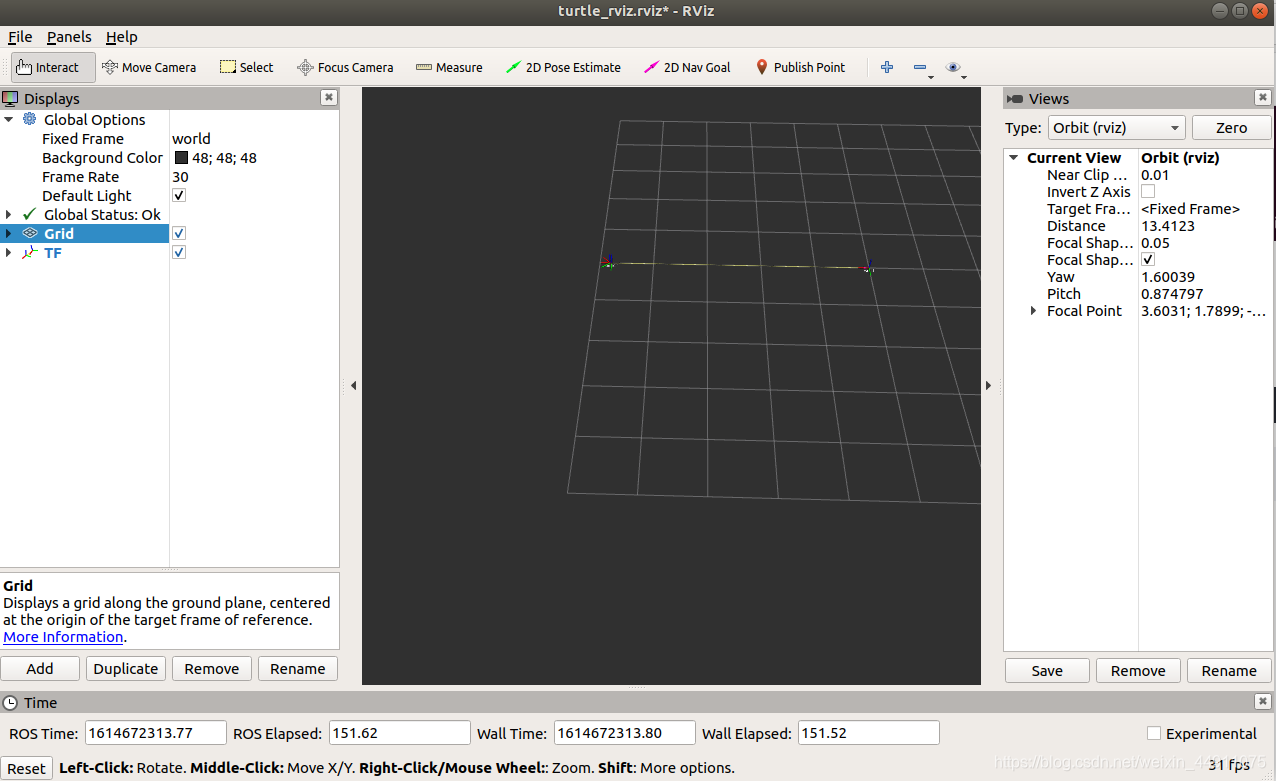
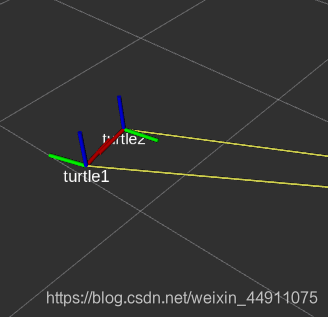
rviz工具
$ rosrun rviz rviz -d `rospack find turtle_tf`/rviz/turtle_rviz.rviz
原理与实现方法会在下一节中给出。
本文的部分代码和图片来源于古月《ROS入门21讲》
往期链接
ROS学习笔记十一(参数的使用与编程方法)
ROS学习笔记十(服务数据的定义与使用)
ROS学习笔记九(服务端Server的编程实现)
ROS学习笔记八(客户端Client的编程实现)
ROS学习笔记七(话题消息的定义与使用)
ROS学习笔记六(订阅者Subscriber的编程实现)
ROS学习笔记五(发布者Publisher的编程实现)
ROS学习笔记四(创建工作空间与功能包)
ROS学习笔记三(ROS命令行工具的使用)
ROS学习笔记二(ROS的核心概念)
ROS学习笔记一(Linux系统基础操作)



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











