







 本文介绍了ROS中的发布者(publisher)和订阅者(subscriber)编程。首先,详细阐述了如何进行发布者编程,包括创建工作空间、功能包及编写C++代码。接着,展示了订阅者编程,目标是订阅海龟的位姿信息,同样包含了代码实现和编译步骤。最终,通过两个终端分别运行发布和订阅,实现了海龟模拟的动态展示。
本文介绍了ROS中的发布者(publisher)和订阅者(subscriber)编程。首先,详细阐述了如何进行发布者编程,包括创建工作空间、功能包及编写C++代码。接着,展示了订阅者编程,目标是订阅海龟的位姿信息,同样包含了代码实现和编译步骤。最终,通过两个终端分别运行发布和订阅,实现了海龟模拟的动态展示。
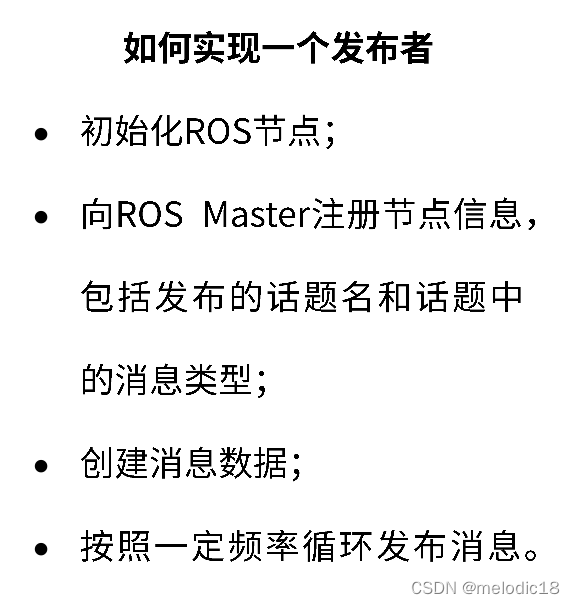
(一)发布者(publisher)编程
创建工作空间并编译
创建功能包:
catkin_create_pkg learning_topic roscpp rospy std_msgs geometry_msgs turtlesim
c++代码如下:
/**
* 该例程将发布turtle1/cmd_vel话题,消息类型geometry_msgs::Twist
*/
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
int main(int argc, char **argv)
{
// ROS节点初始化
ros::init(argc, argv, "velocity_publisher");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Publisher,发布名为/turtle1/cmd_vel的topic,消息类型为geometry_msgs::Twist,队列长度10
ros::Publisher turtle_vel_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 10);
// 设置循环的频率
ros::Rate loop_rate(10);
int count = 0;
while (ros::ok())
{
// 初始化geometry_msgs::Twist类型的消息
geometry_msgs::Twist vel_msg;
vel_msg.linear.x = 0.5;
vel_msg.angular.z = 0.2;
// 发布消息
turtle_vel_pub.publish(vel_msg);
ROS_INFO("Publsh turtle velocity command[%0.2f m/s, %0.2f rad/s]",
vel_msg.linear.x, vel_msg.angular.z);
// 按照循环频率延时
loop_rate.sleep();
}
return 0;
}
返回功能包根目录中,打开cmake.list,在build下面写上:
add_executable(velocity_publisher src/velocity_publisher.cpp)
target_link_libraries(velocity_publisher ${catkin_LIBRARIES})
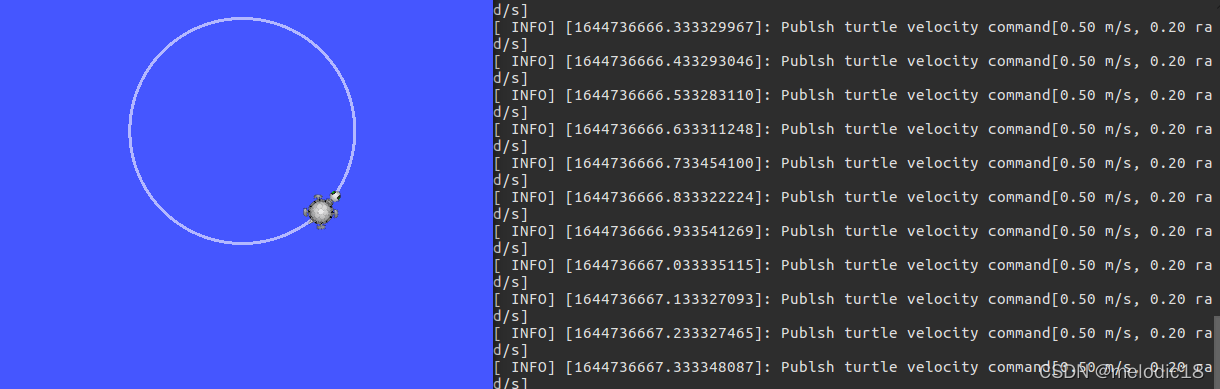
打开终端,运行如下命令:
roscore
rosrun turtlesim turtlesim_node
rosrun learning_topic velocity_publisher
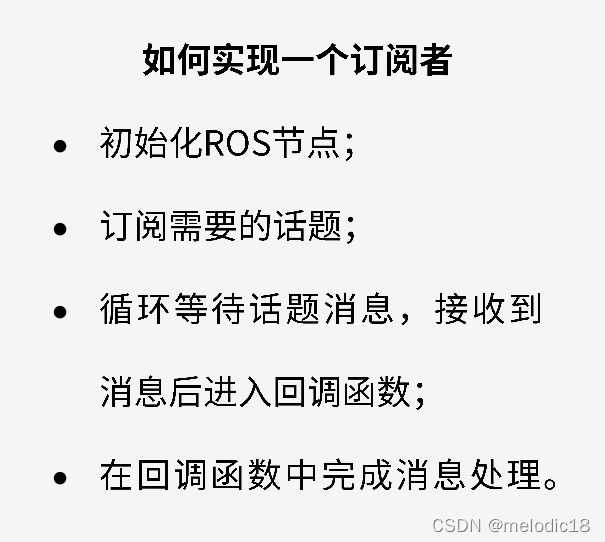
(二)订阅者(subscriber)编程
目标:订阅海龟pose信息(位姿)
c++代码如下:
/**
* 该例程将订阅/turtle1/pose话题,消息类型turtlesim::Pose
*/
#include <ros/ros.h>
#include "turtlesim/Pose.h"
// 接收到订阅的消息后,会进入消息回调函数
void poseCallback(const turtlesim::Pose::ConstPtr& msg)
{
// 将接收到的消息打印出来
ROS_INFO("Turtle pose: x:%0.6f, y:%0.6f", msg->x, msg->y);
}
int main(int argc, char **argv)
{
// 初始化ROS节点
ros::init(argc, argv, "pose_subscriber");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Subscriber,订阅名为/turtle1/pose的topic,注册回调函数poseCallback
ros::Subscriber pose_sub = n.subscribe("/turtle1/pose", 10, poseCallback);
// 循环等待回调函数
ros::spin();
return 0;
}
返回功能包根目录中,打开cmake.list,在build下面写上:
add_executable(pose_subscriber src/pose_subscriber.cpp)
target_link_libraries(pose_subscriber ${catkin_LIBRARIES})
编译后,在终端输入如下命令:
roscore
rosrun turtlesim turtlesim_node
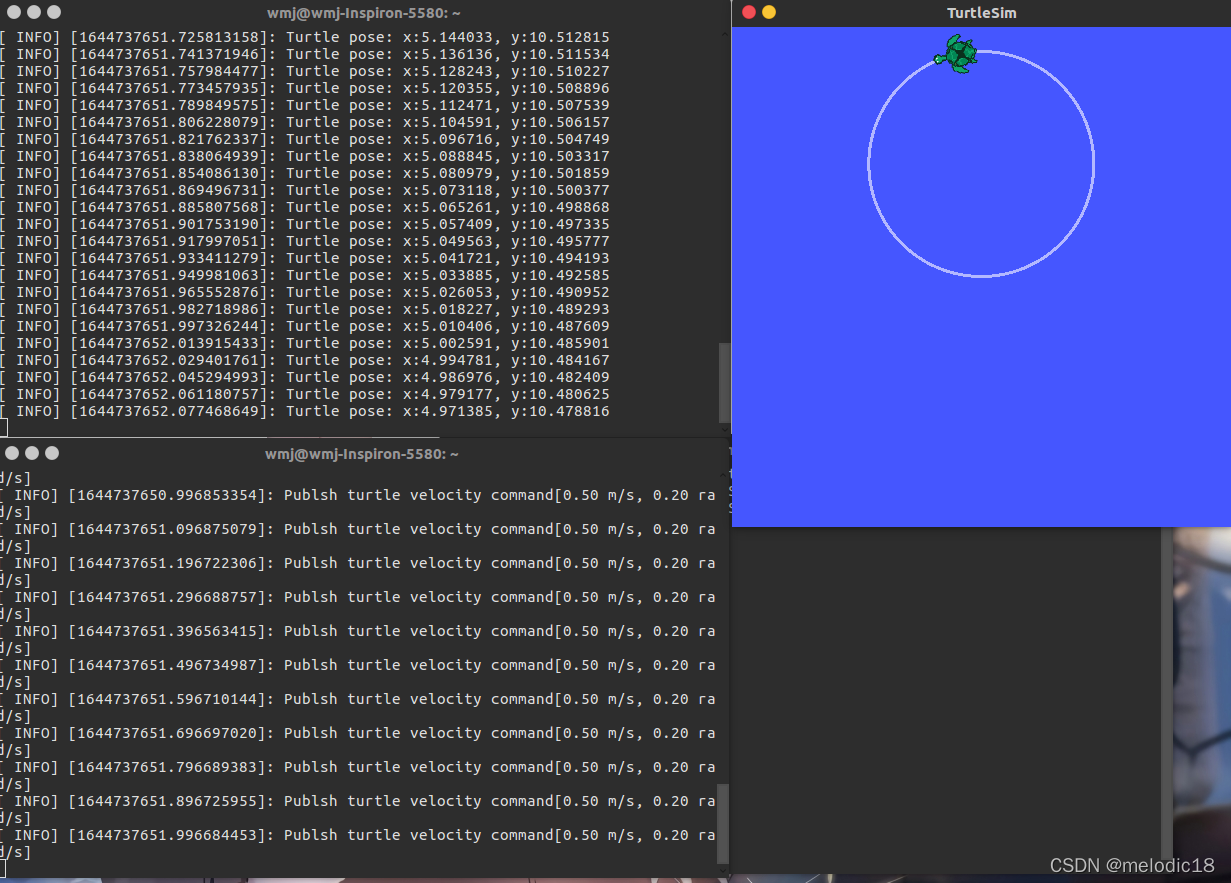
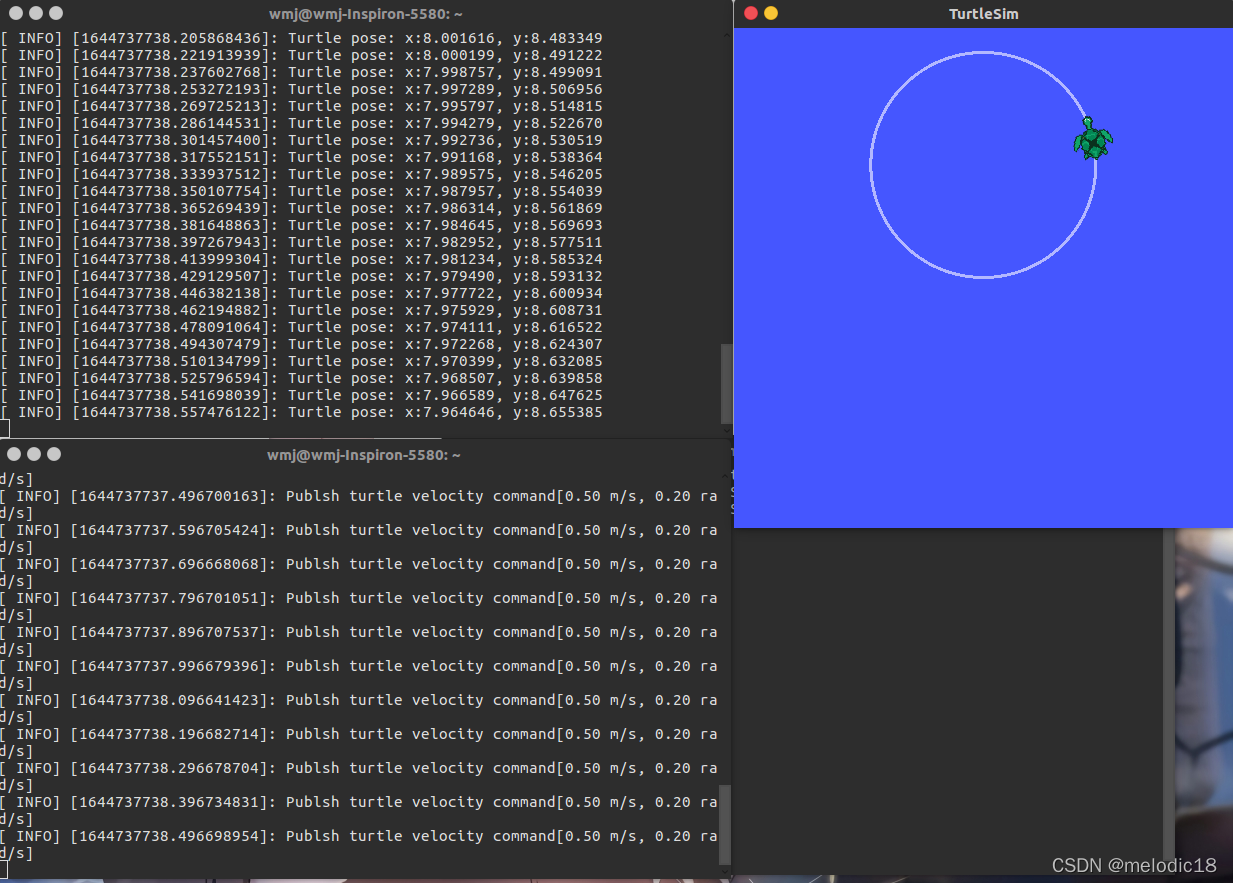
我们可以看到,一个终端发布消息,另一个订阅消息,海龟在如图所示运行:



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











