




 文章讲述了在钻井过程中,如何使用非磁性钻铤隔离磁场干扰,以及在钻柱旋转时如何处理陀螺仪可靠性降低的问题,通过新公式处理动态旋转下的测量,特别关注了倾角影响下的重力和磁场变化及磁工具面角的积分。
文章讲述了在钻井过程中,如何使用非磁性钻铤隔离磁场干扰,以及在钻柱旋转时如何处理陀螺仪可靠性降低的问题,通过新公式处理动态旋转下的测量,特别关注了倾角影响下的重力和磁场变化及磁工具面角的积分。
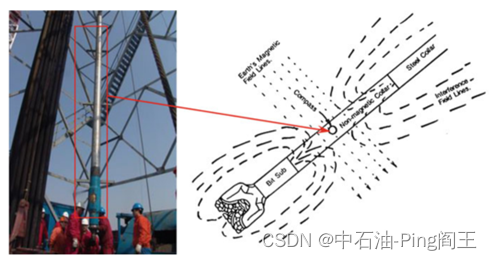
磁性测量工具安装在非磁性钻铤内,如图1,以避免磁性随钻测量工具测量时受到外部干扰。
测量系统采用三轴加速度计和三轴磁通门,并采用冗余设计,由于井下振动剧烈,陀螺仪的可靠性将大大降低。为了保证整个钻井过程中系统的可靠性,我们只以陀螺仪的测量信号作为参考。采用非磁性钻铤将电子测量仪器与上下钻柱的磁场分开,防止传感器处地球磁场的畸变。
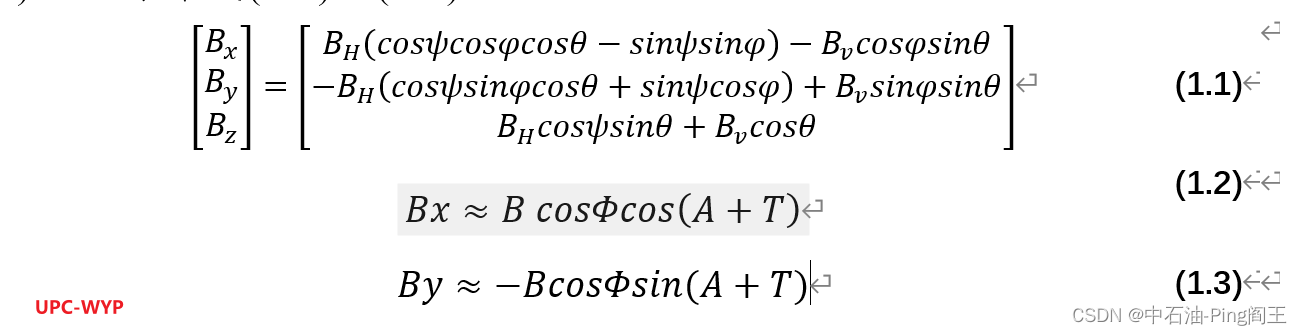
当*钻柱旋转时,静态测量的公式不再适用 *。当传感器安装在旋转钻柱的中心时,测量x和y轴信号将呈现正弦波,平均值为零。因此,我们需要开发一套新的公式来满足动态旋转的需要。
当倾角很小时或者趋向于0,cosI=1,sinI=0(此处I为倾角),于是式(1.1)可以写作式(1.2)和(1.3)。(优快云公式太难打,直接放图)
因为倾角比较小,所以Gx,Gy也非常小(几乎垂直,重力在X,Y轴上无分量)由式(1.4)可知,此时的sinI不可以近似为0。
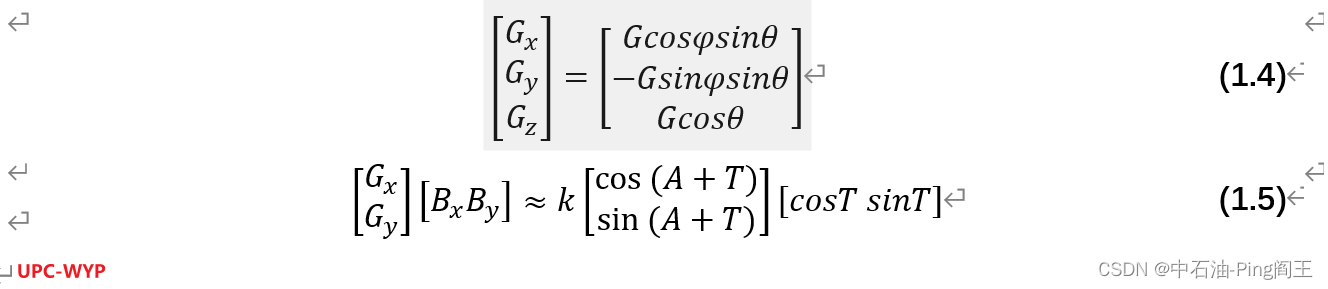
式(1.5)中的k=G∙sinI∙B∙cosΦ,同样sinI也不能看做是0。同样由式(1.5)可以得到式(1.6)(1.7)。

由式(1.6)(1.7)相除之后可得到A_small的值:

当drillstring旋转时,X和Y轴的重力、磁场分量会呈现出正弦变化的波形,上述公式需要进一步推导:

式(1.9)两侧对工具面T积分,得到

那么当钻柱旋转时,A_small’计算公式如下:
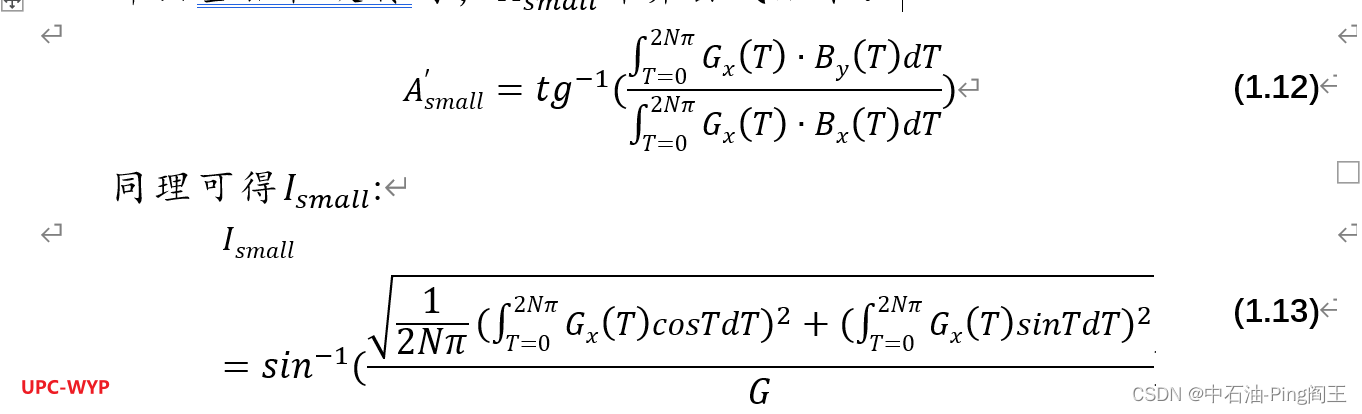
上式中,T为磁工具面角,G为重力加速度。
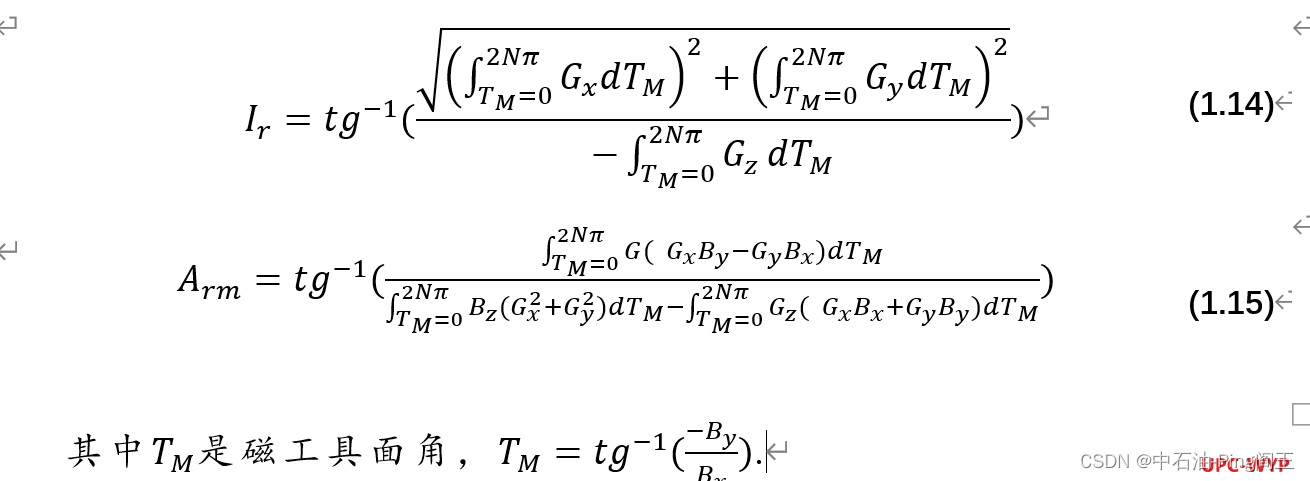
当倾角从0°到90°变化时,对磁工具面角进行全周期的积分,可得到旋转条件下的另一个连续式,下面计算挠度和方位的两式适用于整个井斜工况:
今晚先到这了,后续持续更新。。。
本专栏其他博客:
课题学习(一)----静态测量


















 1281
1281

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











