







 本文详细介绍了根轨迹的概念及其在控制系统分析中的应用,通过多个实例展示了如何利用MATLAB的rlocus函数绘制根轨迹,并探讨了不同参数对系统稳定性的影响。这些例子从简单的系统开始,逐步增加复杂性,帮助读者深入理解根轨迹法。
本文详细介绍了根轨迹的概念及其在控制系统分析中的应用,通过多个实例展示了如何利用MATLAB的rlocus函数绘制根轨迹,并探讨了不同参数对系统稳定性的影响。这些例子从简单的系统开始,逐步增加复杂性,帮助读者深入理解根轨迹法。
根轨迹是开环系统某一参数从零变到无穷时,闭环系统特征方程式的根在s平面上变化的轨迹。根轨迹是分析和设计线性定常控制系统的图解方法,使用十分简便,特别在进行多回路系统的分析时,应用根轨迹法比用其他方法更为方便,因此在工程实践中获得了广泛应用。胡寿松.自动控制原理.北京:科学出版社,2007年第五版:144-159
注:这里所说的开环传函包含单位反馈中的G,和非单位反馈中的GH
例1
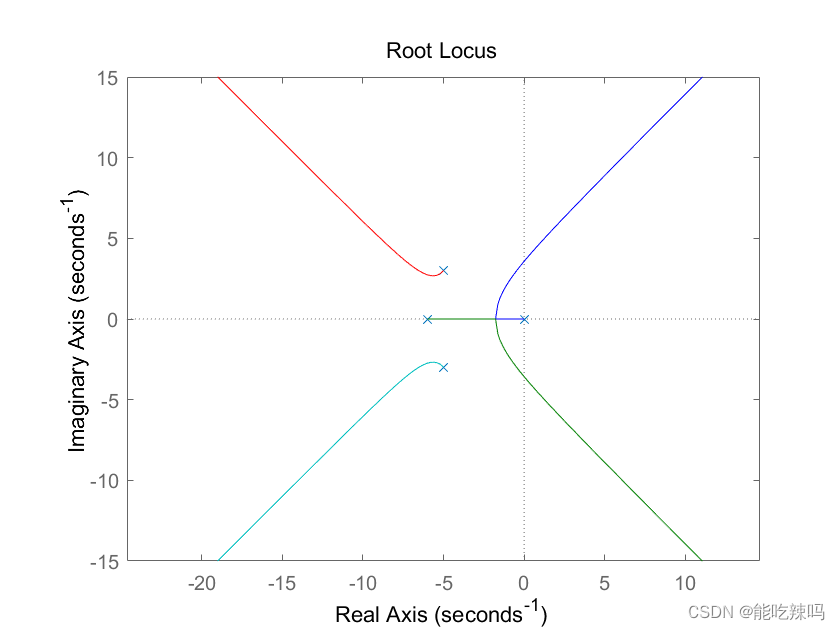
开环传函为 G = 1 s ( s + 6 ) ( ( s + 5 ) 2 + 3 2 ) G=\frac{1}{s(s+6)((s+5)^2+3^2)} G=s(s+6)((s+5)2+32)1开环极点4个: s = 0 , s = − 6 , s = − 5 + 3 i , s = − 5 − 3 i s=0,~s=-6,~s=-5+3i,~s=-5-3i s=0, s=−6, s=−5+3i, s=−5−3imatlab代码为
s = tf('s');
G = 1/(s*(s+6)*((s+5)^2+3^2));
rlocus(G);
axis equal;
图像为
例2
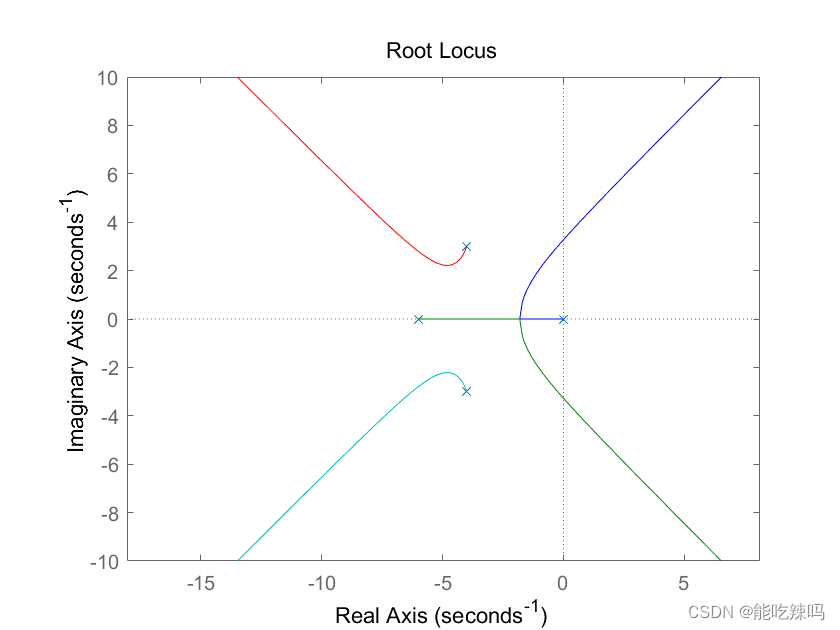
开环传函为 G = 1 s ( s + 6 ) ( ( s + 4 ) 2 + 3 2 ) G=\frac{1}{s(s+6)((s+4)^2+3^2)} G=s(s+6)((s+4)2+32)1开环极点4个: s = 0 , s = − 6 , s = − 4 + 3 i , s = − 4 − 3 i s=0,~s=-6,~s=-4+3i,~s=-4-3i s=0, s=−6, s=−4+3i, s=−4−3imatlab代码为
s = tf('s');
G = 1/(s*(s+6)*((s+4)^2+3^2));
rlocus(G);
axis equal;
图像为
例3
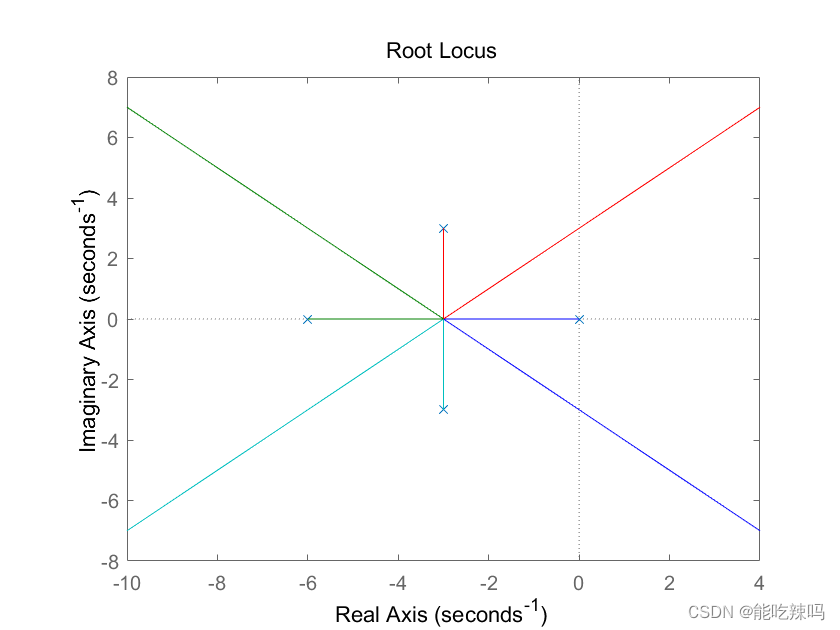
开环传函为 G = 1 s ( s + 6 ) ( ( s + 3 ) 2 + 3 2 ) G=\frac{1}{s(s+6)((s+3)^2+3^2)} G=s(s+6)((s+3)2+32)1开环极点4个: s = 0 , s = − 6 , s = − 3 + 3 i , s = − 3 − 3 i s=0,~s=-6,~s=-3+3i,~s=-3-3i s=0, s=−6, s=−3+3i, s=−3−3imatlab代码为
s = tf('s');
G = 1/(s*(s+6)*((s+3)^2+3^2));
rlocus(G);
axis equal;
图像为
例4
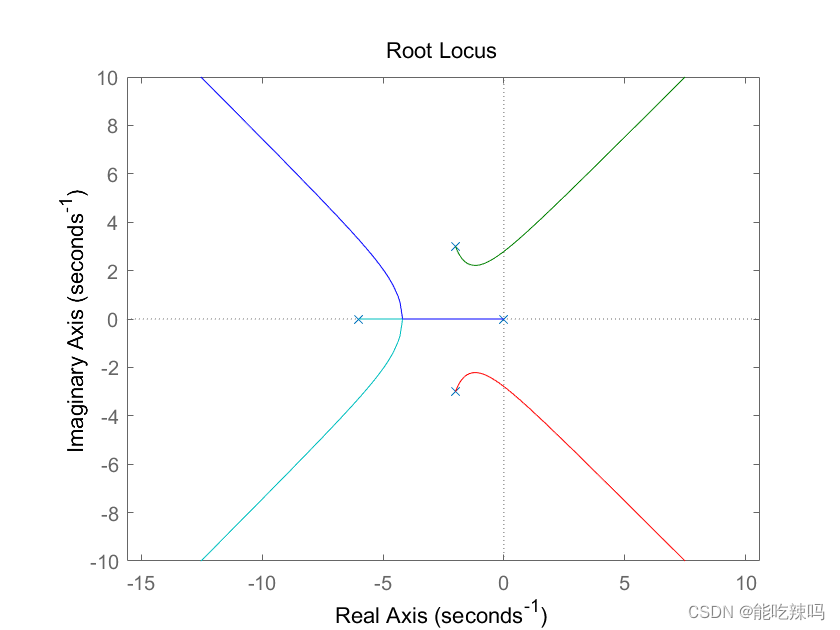
开环传函为 G = 1 s ( s + 6 ) ( ( s + 2 ) 2 + 3 2 ) G=\frac{1}{s(s+6)((s+2)^2+3^2)} G=s(s+6)((s+2)2+32)1开环极点4个: s = 0 , s = − 6 , s = − 2 + 3 i , s = − 2 − 3 i s=0,~s=-6,~s=-2+3i,~s=-2-3i s=0, s=−6, s=−2+3i, s=−2−3imatlab代码为
s = tf('s');
G = 1/(s*(s+6)*((s+2)^2+3^2));
rlocus(G);
axis equal;
图像为
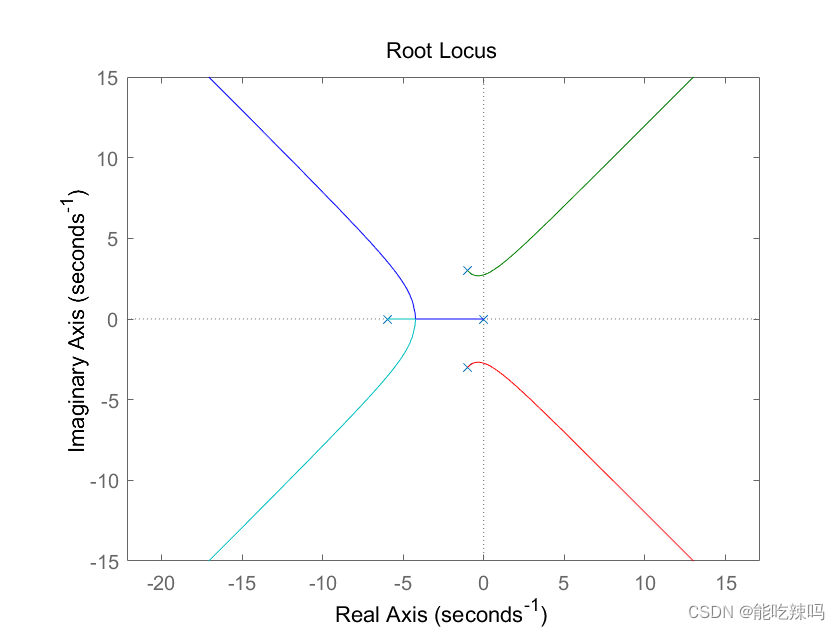
例5
开环传函为 G = 1 s ( s + 6 ) ( ( s + 1 ) 2 + 3 2 ) G=\frac{1}{s(s+6)((s+1)^2+3^2)} G=s(s+6)((s+1)2+32)1开环极点4个: s = 0 , s = − 6 , s = − 1 + 3 i , s = − 1 − 3 i s=0,~s=-6,~s=-1+3i,~s=-1-3i s=0, s=−6, s=−1+3i, s=−1−3imatlab代码为
s = tf('s');
G = 1/(s*(s+6)*((s+1)^2+3^2));
rlocus(G);
axis equal;
图像为




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











