







多分类问题
B站 刘二大人 的PyTorch深度学习实践——多分类问题
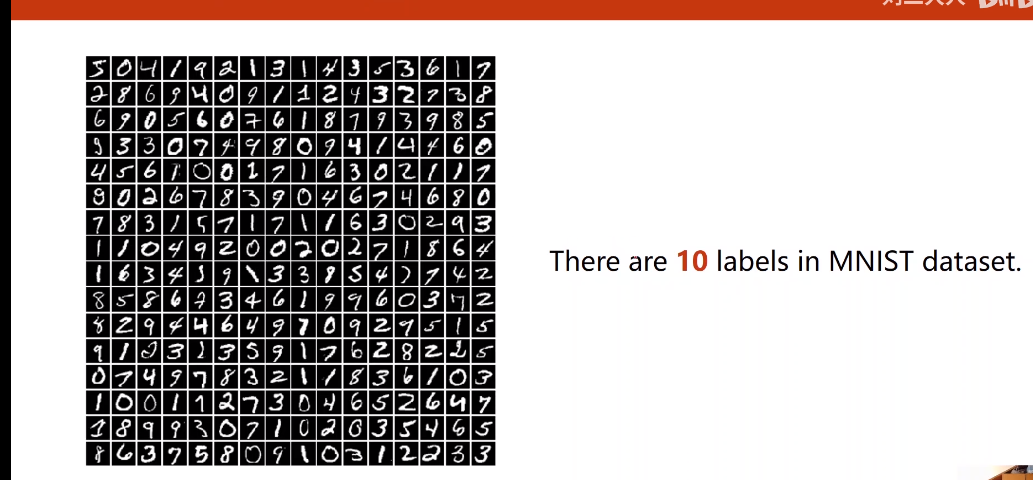
在多分类的视频中,我们了解到,我们要对图中的数字进行输出分类,判断他们是什么数字,这里就会出现两个问题,一个是让输出相互抑制,并且让概率之和相加正好为1,二是概率都大于0.
视频中截图
说明:
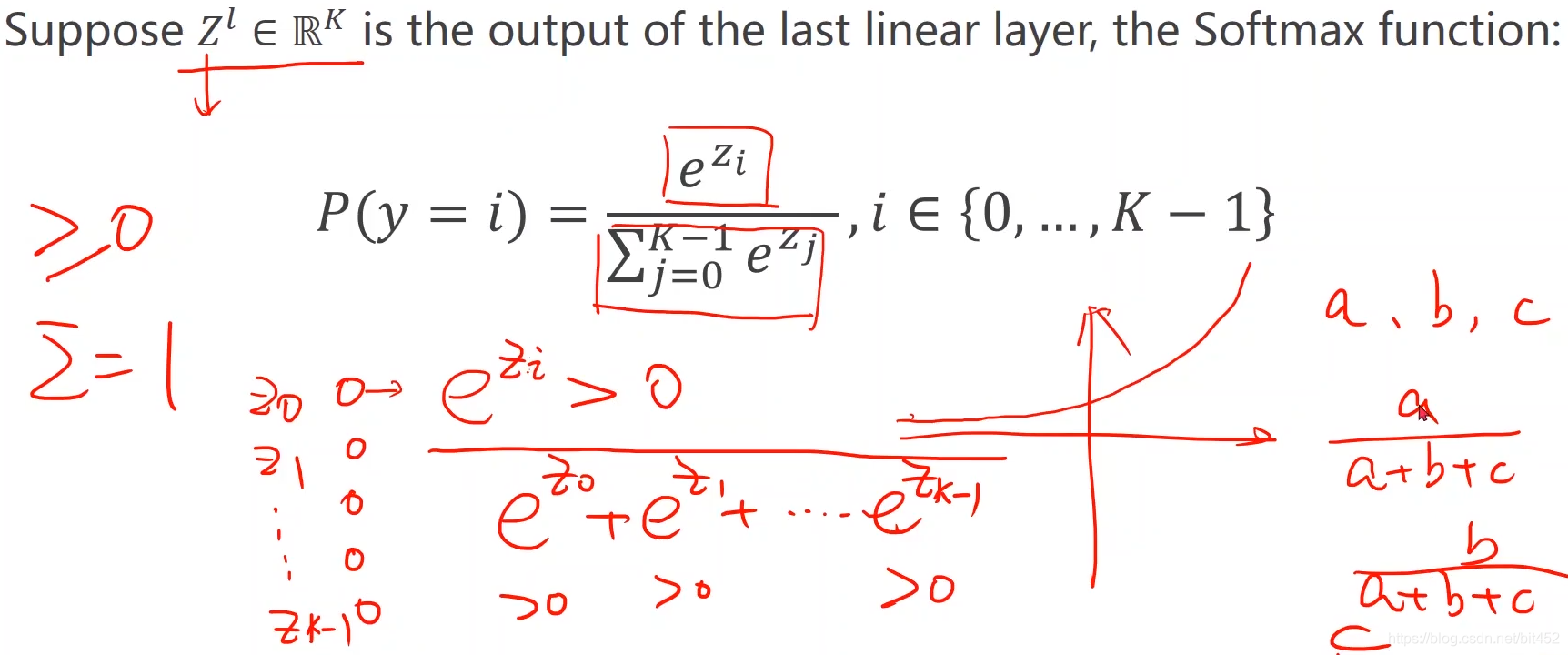
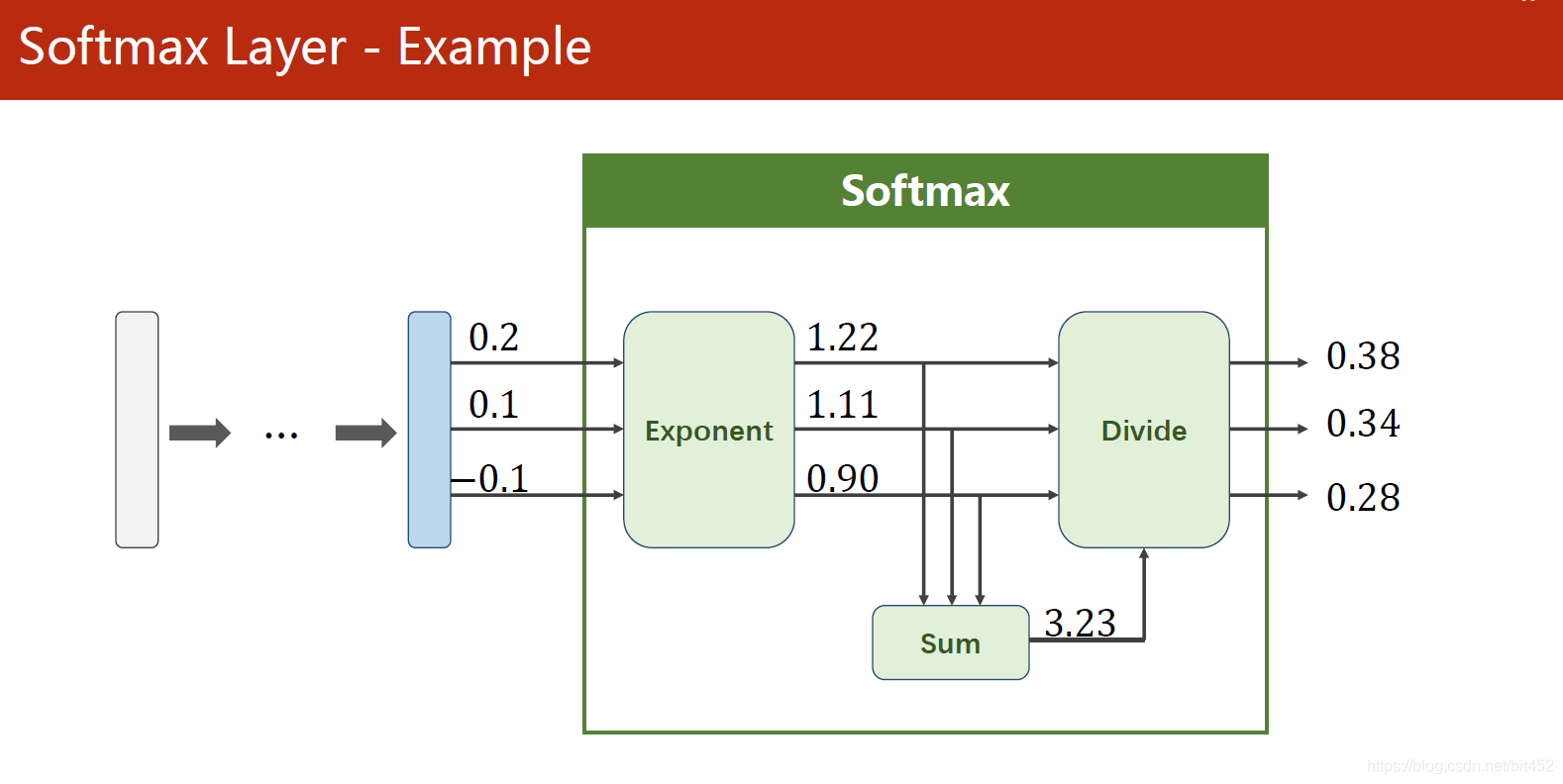
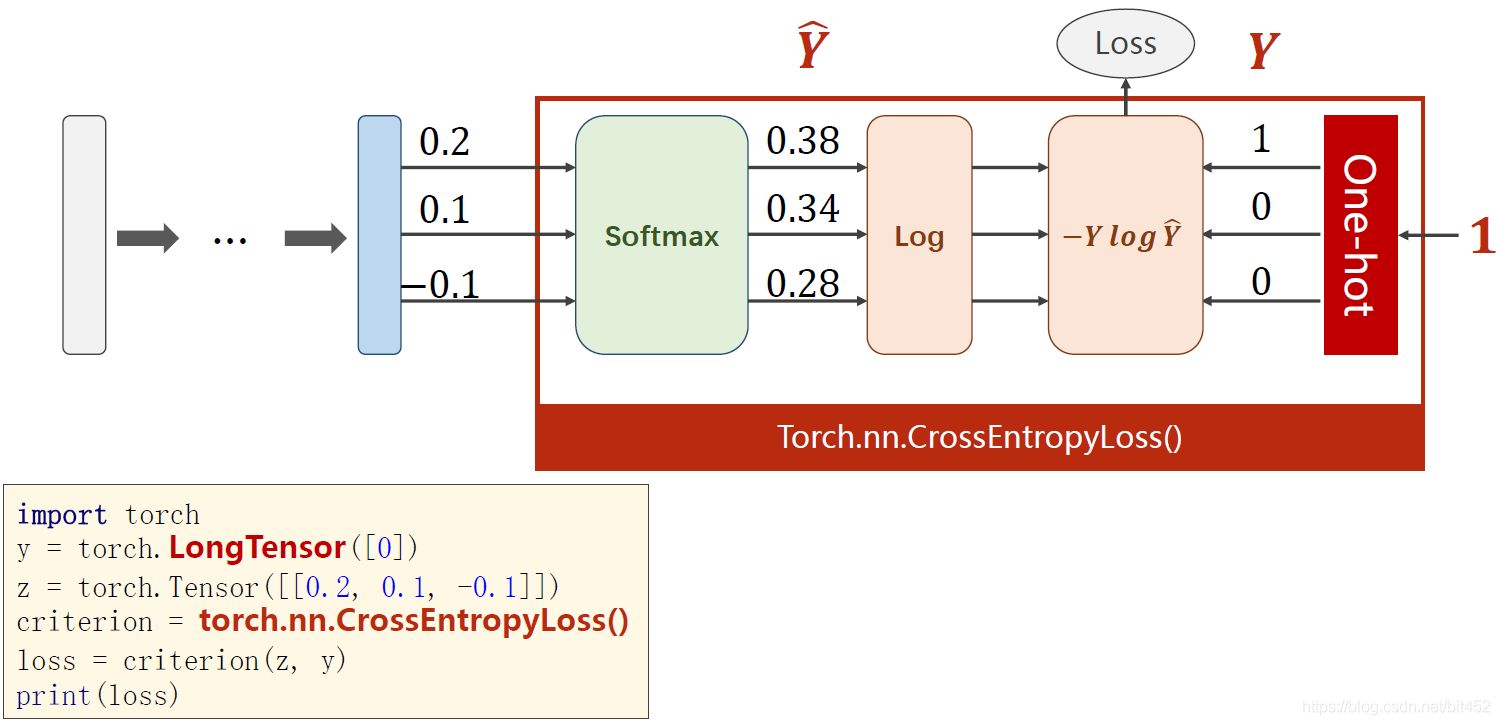
1、softmax的输入不需要再做非线性变换,也就是说softmax之前不再需要激活函数(relu)。softmax两个作用,如果在进行softmax前的input有负数,通过指数变换,得到正数。所有类的概率求和为1。
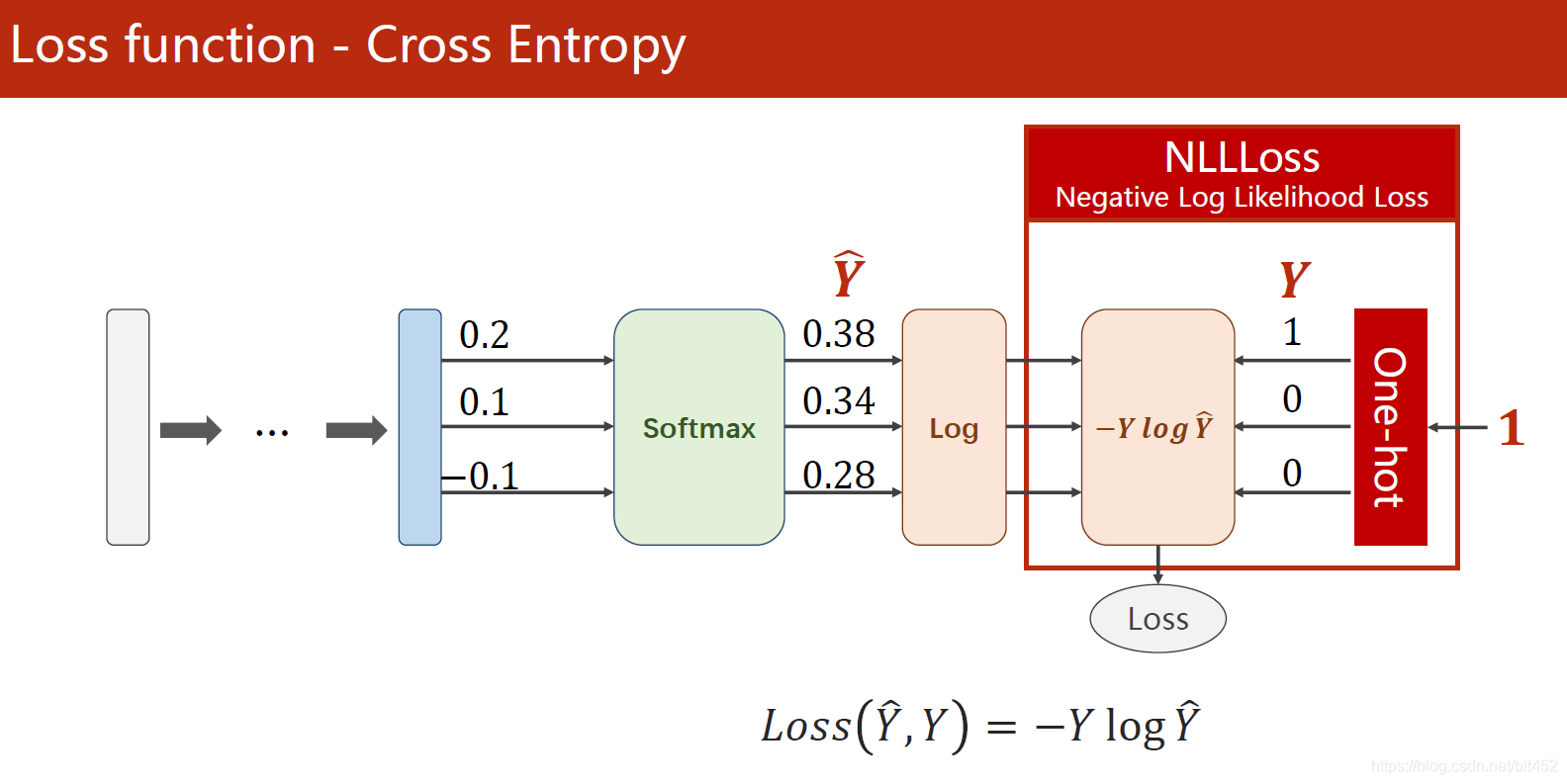
2、y的标签编码方式是one-hot。我对one-hot的理解是只有一位是1,其他位为0。(但是标签的one-hot编码是算法完成的,算法的输入仍为原始标签)
3、多分类问题,标签y的类型是LongTensor。比如说0-9分类问题,如果y = torch.LongTensor([3]),对应的one-hot是[0,0,0,1,0,0,0,0,0,0].(这里要注意,如果使用了one-hot,标签y的类型是LongTensor,糖尿病数据集中的target的类型是FloatTensor)
4、CrossEntropyLoss <==> LogSoftmax + NLLLoss。也就是说使用CrossEntropyLoss最后一层(线性层)是不需要做其他变化的;使用NLLLoss之前,需要对最后一层(线性层)先进行SoftMax处理,再进行log操作。
代码说明:
1、第8讲 from torch.utils.data import Dataset,第9讲 from torchvision import datasets。该datasets里面init,getitem,len魔法函数已实现。
2、torch.max的返回值有两个,第一个是每一行的最大值是多少,第二个是每一行最大值的下标(索引)是多少。
3、全连接神经网络
4、torch.no_grad() Python中with的用法
5、代码中"_"的说明 Python中各种下划线的操作
6、torch.max( )的用法 torch.max( )使用讲解
import torch
from torchvision import transforms
from torchvision import datasets
from torch.utils.data import DataLoader
import torch.nn.functional as F
import torch.optim as optim
# prepare dataset
batch_size = 64
transform = transforms.Compose([transforms.ToTensor(), transforms.Normalize((0.1307,), (0.3081,))]) # 归一化,均值和方差
train_dataset = datasets.MNIST(root='../dataset/mnist/', train=True, download=True, transform=transform)
train_loader = DataLoader(train_dataset, shuffle=True, batch_size=batch_size)
test_dataset = datasets.MNIST(root='../dataset/mnist/', train=False, download=True, transform=transform)
test_loader = DataLoader(test_dataset, shuffle=False, batch_size=batch_size)
# design model using class
class Net(torch.nn.Module):
def __init__(self):
super(Net, self).__init__()
self.l1 = torch.nn.Linear(784, 512) #数据为28X28的矩阵
self.l2 = torch.nn.Linear(512, 256)
self.l3 = torch.nn.Linear(256, 128)
self.l4 = torch.nn.Linear(128, 64)
self.l5 = torch.nn.Linear(64, 10)
def forward(self, x):
x = x.view(-1, 784) # -1其实就是自动获取mini_batch
x = F.relu(self.l1(x))
x = F.relu(self.l2(x))
x = F.relu(self.l3(x))
x = F.relu(self.l4(x))
return self.l5(x) # 最后一层不做激活,不进行非线性变换
model = Net()
# construct loss and optimizer
criterion = torch.nn.CrossEntropyLoss()
optimizer = optim.SGD(model.parameters(), lr=0.01, momentum=0.5)
# training cycle forward, backward, update
def train(epoch):
running_loss = 0.0
for batch_idx, data in enumerate(train_loader, 0):
# 获得一个批次的数据和标签
inputs, target = data
optimizer.zero_grad()
# 获得模型预测结果(64, 10)
outputs = model(inputs)
# 交叉熵代价函数outputs(64,10),target(64)
loss = criterion(outputs, target)
loss.backward()
optimizer.step()
running_loss += loss.item()
if batch_idx % 300 == 299:
print('[%d, %5d] loss: %.3f' % (epoch+1, batch_idx+1, running_loss/300))
running_loss = 0.0
def test():
correct = 0
total = 0
with torch.no_grad():
for data in test_loader:
images, labels = data
outputs = model(images)
_, predicted = torch.max(outputs.data, dim=1) # dim = 1 列是第0个维度,行是第1个维度
total += labels.size(0)
correct += (predicted == labels).sum().item() # 张量之间的比较运算
print('accuracy on test set: %d %% ' % (100*correct/total))
if __name__ == '__main__':
for epoch in range(10):
train(epoch)
test()

















 3405
3405

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









