






 本文介绍了线性代数的基础知识,包括向量的概念,矩阵的乘法、加法及特殊类型的矩阵,如单位矩阵、对角矩阵。还讨论了矩阵乘法的性质,如非交换性和对称性,以及矩阵的逆、特征值和特征向量。线性代数在机器学习中的重要性在于它提供了处理和理解数据结构的数学工具。
本文介绍了线性代数的基础知识,包括向量的概念,矩阵的乘法、加法及特殊类型的矩阵,如单位矩阵、对角矩阵。还讨论了矩阵乘法的性质,如非交换性和对称性,以及矩阵的逆、特征值和特征向量。线性代数在机器学习中的重要性在于它提供了处理和理解数据结构的数学工具。
文章目录
- 总览
- 向量
- 矩阵
- 矩阵乘法
- 矩阵对称性
- 非负矩阵
- 单位矩阵 (Identity Matrix)
- 对角矩阵 (Diagonal Matrix)
- 矩阵加法
- 内积 (Inner Product)
- 正交向量 (Orthogonal Vectors)
- 方阵的迹(Trace)
- 方阵的行列式 (Determinant)
- 方阵的伴随矩阵 (Adjoint)
- 逆矩阵 (Inverse Matrix)
- 线性独立性 (Linear Independence) 和秩 (Rank)
- 正交矩阵 (Orthogonal Matrix)
- 矩阵的正定性 (Positive Definiteness)
- 特征值 (Eigenvalue) 和特征向量 (Eigenvector)
总览
假设我们要通过一些特征来描述一个人,比如: 身高,体重,颈部周长,手臂周长和年龄。每个人的这些特征可能都会不一样,让我们将他们用
x
1
,
x
2
,
x
3
,
x
4
,
x
5
x1, x2, x3, x4, x5
x1,x2,x3,x4,x5 来代表。此时,我们就可以用 向量(vector) 来代表拥有这些特征的个人,如
[
175
c
m
,
60
k
g
,
20
c
m
,
15
c
m
,
25
岁
]
[175cm, 60kg, 20cm, 15cm, 25岁]
[175cm,60kg,20cm,15cm,25岁]。
如果我们要用数据结构来表示一大群人,矩阵 (Matrix) 就可以被用来代表这些人。
为什么学习机器学习之前你要了解线性代数?
答:“线性代数提供了一个数学框架来推理和操作向量和矩阵。 这在机器学习中广泛用于建模和解决问题。”
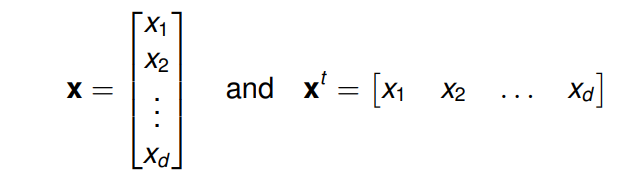
向量
一个
d
d
d 维的列向量
x
x
x及其转置(一个行向量)
x
t
x^t
xt 可以用如下方式表示:
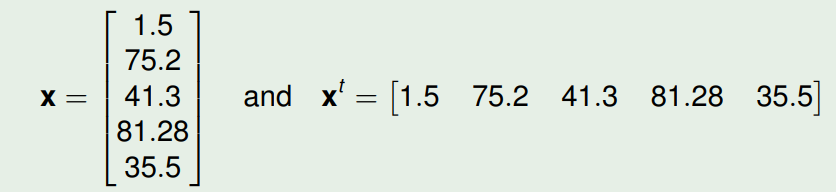
献上实例:
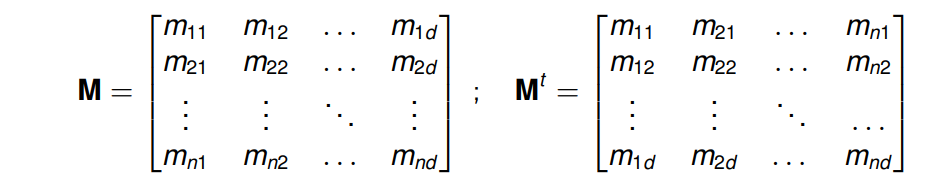
矩阵
一个
n
∗
d
n * d
n∗d 的矩阵
M
M
M以及其
d
∗
n
d * n
d∗n 的转置矩阵
M
t
M^{t}
Mt分别被写为:
献上实例 (
3
∗
5
3 * 5
3∗5 的矩阵 及其 转置):

我们可以将矩阵
M
M
M 的各个条目写为
m
i
j
m_{ij}
mij的形式,其中
i
i
i 和
j
j
j 分别指代 行值 和 列值。
矩阵乘法
基础
两个矩阵
A
A
A( 尺寸为
m
∗
n
m * n
m∗n)和矩阵
B
B
B(尺寸为
n
∗
d
n * d
n∗d)的乘积
C
C
C 表示为:
C
=
A
B
C = AB
C=AB
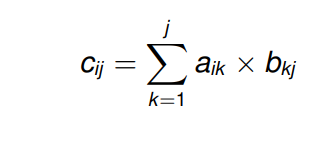
其中
C
C
C的每个条目
c
i
j
c_{ij}
cij分别为:
其中,
C
C
C的转置为:
C
t
=
(
A
B
)
t
=
B
t
A
t
C^t = (AB)^t = B^tA^t
Ct=(AB)t=BtAt
矩阵乘法实例:

m
11
=
4.6
×
3.5
+
5.7
×
1.5
+
6.1
×
4.1
+
5.5
×
7.5
=
90.91
m_{11} = 4.6 × 3.5 + 5.7 × 1.5 + 6.1 × 4.1 + 5.5 × 7.5 = 90.91
m11=4.6×3.5+5.7×1.5+6.1×4.1+5.5×7.5=90.91
m
32
=
3.5
×
6.2
+
5.3
×
3.7
+
9.5
×
8.7
+
8.5
×
4.1
=
158.81
m_{32} = 3.5 × 6.2 + 5.3 × 3.7 + 9.5 × 8.7 + 8.5 × 4.1 = 158.81
m32=3.5×6.2+5.3×3.7+9.5×8.7+8.5×4.1=158.81
矩阵和向量相乘
矩阵
M
M
M 可以和向量
x
x
x 相乘从而得到另一个向量
y
y
y: (
M
M
M 的列数必须和
x
x
x 的行数相同)
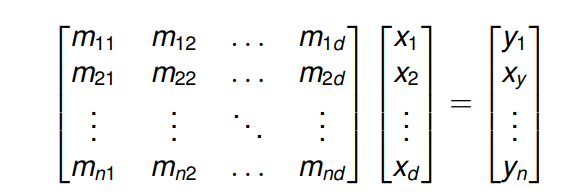
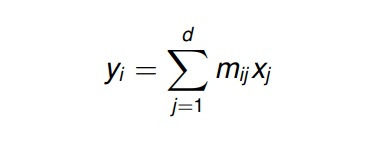
其中
y
y
y 的每个元素可以这么计算:
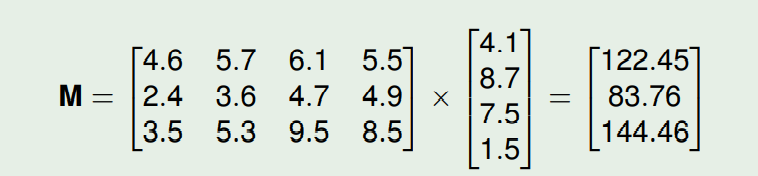
献上实例:
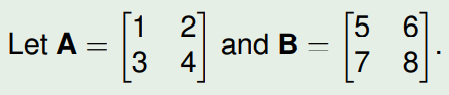
矩阵相乘不符合交换律
A
×
B
A × B
A×B 和
B
×
A
B × A
B×A并不总是相等。


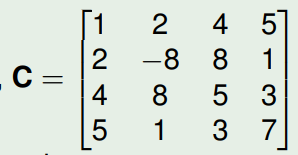
矩阵对称性
一个方阵 (square matrix,即
d
×
d
d × d
d×d)
M
M
M, 若其条目符合
m
i
j
=
m
j
i
m_{ij} = m_{ji}
mij=mji,则其为对称矩阵(symmetric)。如下图。
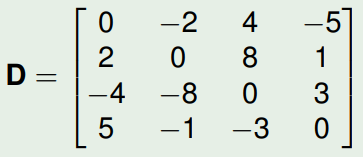
若其条目符合
m
i
j
=
−
m
j
i
m_{ij} = -m_{ji}
mij=−mji,则其为 偏对称矩阵 (skew-symmetric) 或 反对称矩阵 (anti-symmetric)。如下图。
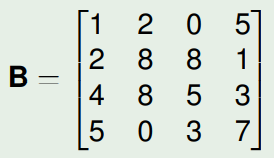
非负矩阵
当矩阵
M
M
M 的所有条目都不小于0,则该矩阵为非负的。
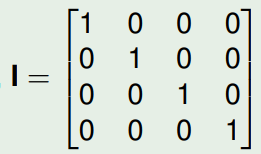
单位矩阵 (Identity Matrix)
当一个方阵
I
I
I 的对角线条目都等于 1 而其他条目都等于0,则其为单位矩阵。
下图为维度是4的单位矩阵
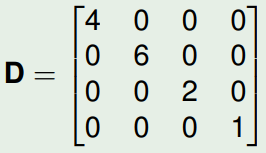
对角矩阵 (Diagonal Matrix)
对角矩阵是在所有非对角线项中都为 0 的矩阵,表示为
d
i
a
g
(
m
11
,
m
22
,
.
.
,
m
d
d
)
diag(m11, m22, . . , mdd )
diag(m11,m22,..,mdd)
实例如下图:
矩阵加法
向量和矩阵的相加是 一个项 加上 同样位置的另一个项。
如下图,两个兼容矩阵 (Compatible Matrices) 的累加

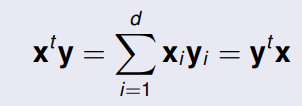
内积 (Inner Product)
具有相同维度
d
d
d 的两个向量
x
x
x 和
y
y
y 的内积(或被称为标量积 scalar product)将表示为
x
t
y
x^ty
xty 并且结果是标量。
标量(Scalar): 一个标量就是一个单独的数,即只有大小,没有方向的量。
向量
x
x
x 的欧几里得范数或长度 (Euclidean Norm or Length) 是:
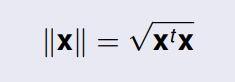
若该范数等于1,则向量已经被归一化 (normalized)。
两个
d
d
d 维向量之间的角度
θ
\theta
θ 可以通过下式获得:
内积是衡量两个向量 共线性(colinearity) 的指标,这是一种在比例因子 (scale factor) 内相似性的指示。
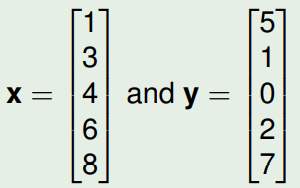
下图是两个向量内积的例子:
x
t
y
=
1
×
5
+
3
×
1
+
4
×
0
+
6
×
2
+
8
×
7
=
76
x^ty = 1 × 5 + 3 × 1 + 4 × 0 + 6 × 2 + 8 × 7 = 76
xty=1×5+3×1+4×0+6×2+8×7=76
向量
x
x
x 的矢量 (magnitude) 等于:
∥
x
∥
=
1
×
1
+
3
×
3
+
4
×
4
+
6
×
6
+
8
×
8
=
126
=
11.23
\Vert x \Vert = \sqrt{1 × 1 + 3 × 3 + 4 × 4 + 6 × 6 + 8 × 8} = \sqrt{126} = 11.23
∥x∥=1×1+3×3+4×4+6×6+8×8=126=11.23
向量
y
y
y 的矢量 (magnitude) 等于:
∥
y
∥
=
5
×
5
+
1
×
1
+
0
+
2
×
2
+
7
×
7
=
79
=
8.89
\Vert y \Vert = \sqrt{5 × 5 + 1 × 1 + 0 + 2 × 2 + 7 × 7} = \sqrt{79} = 8.89
∥y∥=5×5+1×1+0+2×2+7×7=79=8.89
因此向量
x
x
x 和
y
y
y 之间的角度等于:

正交向量 (Orthogonal Vectors)
若
x
t
y
=
0
x^ty = 0
xty=0,则这两个向量是正交的。
若
x
t
y
=
∥
x
∥
∥
y
∥
x^ty = \Vert x \Vert\Vert y \Vert
xty=∥x∥∥y∥,则这两个向量是共线 (colinear) 的。
Cauchy-Schwartz 不等式直接来自上述的对 两个向量之间的角度 的定义:
x
t
y
≤
∥
x
∥
∥
y
∥
x^ty \le \Vert x \Vert\Vert y \Vert
xty≤∥x∥∥y∥
方阵的迹(Trace)
方阵
A
A
A的迹 (又被记作
T
r
{
A
}
Tr\{A\}
Tr{A})是其对角元素之和。
其中,
T
r
{
C
D
}
=
T
r
{
D
C
}
Tr\{CD\} = Tr\{DC\}
Tr{CD}=Tr{DC} 假设了
C
D
CD
CD 的乘积是方阵,因此不需要保证
C
C
C或
D
D
D为方阵。
下面是 迹 的实例
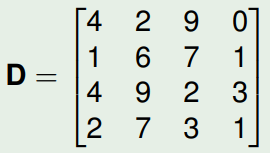
矩阵
D
D
D的迹是
4
+
6
+
2
+
1
=
13
4+6+2+1=13
4+6+2+1=13
方阵的行列式 (Determinant)
d
d
d 维方阵
M
M
M 的行列式被记为
∣
M
∣
|M|
∣M∣
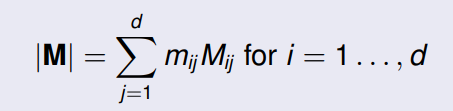
其中,辅因子矩阵 (cofactor)
M
i
j
M_{ij}
Mij 是删除
M
M
M 的第
i
i
i 行和第
j
j
j 列形成的矩阵的行列式,并乘以
(
−
1
)
i
+
j
(-1)^{i+j}
(−1)i+j。
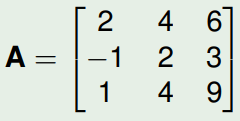
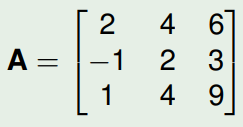
实例如下图:
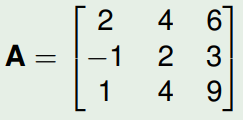
其行列式等于:
2
×
(
2
×
9
−
3
×
4
)
−
4
×
(
−
1
×
9
−
1
×
3
)
+
6
×
(
−
1
×
4
−
2
×
1
)
=
24
2 × (2 × 9 − 3 × 4) − 4 × (−1 × 9 − 1 × 3) + 6 × (−1 × 4 − 2 × 1) = 24
2×(2×9−3×4)−4×(−1×9−1×3)+6×(−1×4−2×1)=24
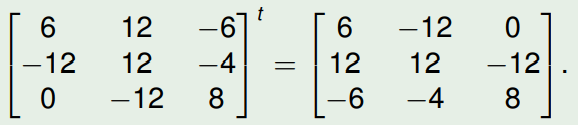
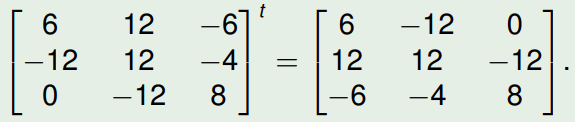
方阵的伴随矩阵 (Adjoint)
由辅因子组成的矩阵的转置,
C
(
c
i
j
=
M
i
j
)
C(c_{ij} = M_{ij})
C(cij=Mij),被称为
M
M
M 的伴随矩阵,即
A
d
j
[
M
]
Adj[M]
Adj[M]
其伴随矩阵等于:
逆矩阵 (Inverse Matrix)
d
d
d 维矩阵
M
M
M 的逆矩阵
M
−
1
M^{-1}
M−1符合:
M
−
1
M
=
M
M
−
1
=
I
M^{-1}M = MM^{-1} = I
M−1M=MM−1=I
逆矩阵可以使用以下求法:
M
−
1
=
A
d
j
[
M
]
∣
M
∣
M^{-1} = \frac{Adj[M]}{|M|}
M−1=∣M∣Adj[M]
也就是
M
M
M 的伴随矩阵 除以
M
M
M 的行列式。
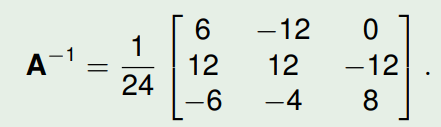
逆矩阵的实例如下:
在之前我们已经计算了
A
A
A 的行列式等于 24,其伴随矩阵如下
因此,
A
A
A的逆矩阵等于:
若 矩阵的逆 存在则我们可以说该矩阵非奇异 (nonsingular),
否则这个矩阵就不存在 逆,其是奇异 (singular) 的同时 矩阵的行列式
∣
M
∣
=
0
|M| = 0
∣M∣=0。
一些特性:
(
M
t
)
−
1
=
(
M
−
1
)
t
(M^t)^{-1} = (M^{-1})^t
(Mt)−1=(M−1)t,
(
A
B
)
−
1
=
B
−
1
A
−
1
(AB)^{-1} = B^{-1}A^{-1}
(AB)−1=B−1A−1
线性独立性 (Linear Independence) 和秩 (Rank)
若
k
k
k 个拥有相同维度的向量,存在一系列不全为0的标量
c
1
,
c
2
,
.
.
.
,
c
k
c_1, c_2, ..., c_k
c1,c2,...,ck,使得以下式子成立,则可以说这些向量是线性相关的:
c
1
x
1
+
⋅
⋅
⋅
+
c
k
x
k
=
0
c_1x_1 + · · · + c_kx_k = 0
c1x1+⋅⋅⋅+ckxk=0
若无法找到这些标量,则这些向量被称为线性独立。
一个矩阵的秩 也就是 矩阵中线性独立行的最大数量 (或者,线性独立列的最大数量)。
若一个
d
×
d
d × d
d×d 的矩阵的秩等于
d
d
d,则其是满秩的 (full rank)。同时,其行列式将会是非0且其会拥有逆矩阵。
对于一个非方阵的矩阵 M M M ( d × n d × n d×n), M M M 的秩满足: r a n k ( M ) ≤ m i n ( d , n ) rank(M) \le min(d, n) rank(M)≤min(d,n)
其中,我们还能得到 r a n k ( M ) = r a n k ( M t ) = r a n k ( M t M ) = r a n k ( M M t ) rank(M) = rank(M^t) = rank(M^tM) = rank(MM^t) rank(M)=rank(Mt)=rank(MtM)=rank(MMt)
正交矩阵 (Orthogonal Matrix)
当一个方阵
M
M
M 满足以下式子,其是正交的:
M
M
t
=
M
t
M
=
I
MM^t = M^tM = I
MMt=MtM=I (注意和逆矩阵的公式区别)
行和列都是正交的。对于任意不同的两列 x x x 和 y y y,满足 x t y = 0 x^ty = 0 xty=0, x t x = 1 x^tx = 1 xtx=1, y t y = 1 y^ty = 1 yty=1。
一个正交矩阵代表了 会保留距离和角度 的线性转换(linear transformation) 包括旋转和反转。
一个正交矩阵是非奇异的,同时其逆矩阵就是其转置, M − 1 = M t M^{-1} = M^t M−1=Mt
正交矩阵的行列式等于 ± 1 \pm1 ±1,其中 − 1 -1 −1 表示反转 而 + 1 +1 +1代表了纯旋转。
矩阵的正定性 (Positive Definiteness)
若一个方阵对于所有的非零向量
x
x
x,其二次型 (Quadratic Form) 满足
x
t
M
x
>
0
x^tMx \gt 0
xtMx>0, 则其具有正定性。一个正定矩阵是满秩的。
若一个方阵对于所有的非零向量
x
x
x,其二次型 (Quadratic Form) 满足
x
t
M
x
≥
0
x^tMx \ge 0
xtMx≥0, 则其具有半正定性 (Positive Semidefinite)。
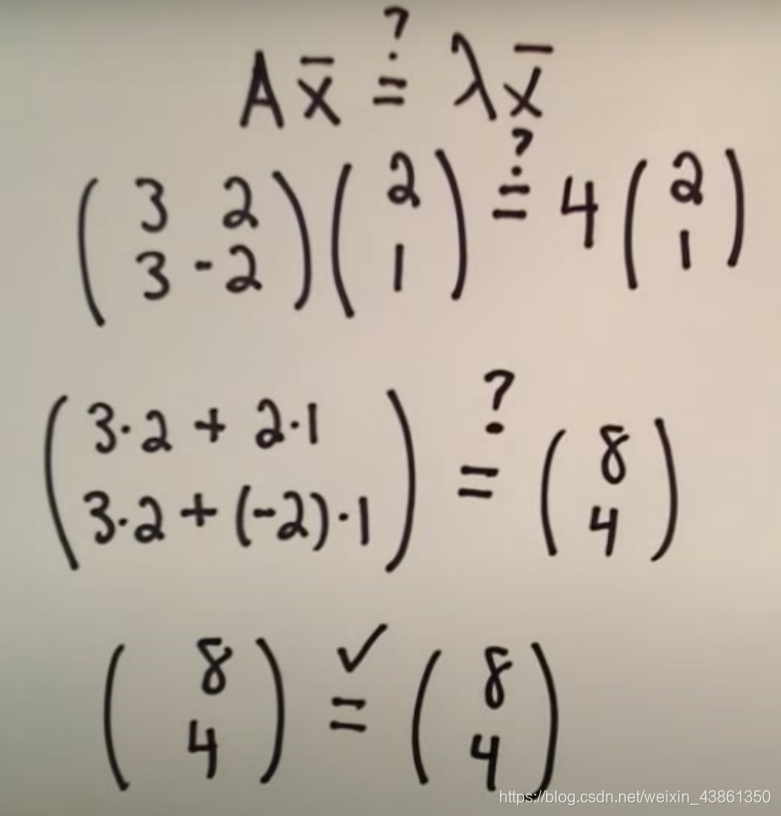
特征值 (Eigenvalue) 和特征向量 (Eigenvector)
给定一个 d d d 维方阵 M M M,对于标量 λ \lambda λ,当存在一个非零向量 x x x 使得以下等式成立:
M x = λ x Mx = \lambda x Mx=λx 或者 ( M − λ I ) x = 0 (M - \lambda I)x = 0 (M−λI)x=0
则 标量
λ
\lambda
λ 被称为
M
M
M 的特征值 而
x
x
x 是和该特征值相关的
M
M
M 的特征向量。
因此不同的特征值会导致不同的特征向量。
下图是例子:
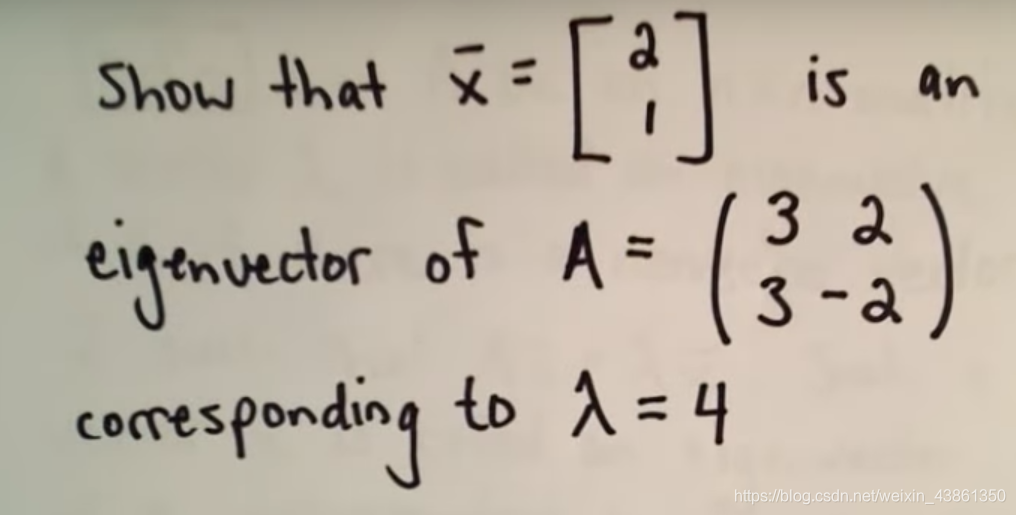
验证过程:
特征方程 (Characteristic Equation) 的解:
∣
M
−
λ
I
∣
=
0
|M - \lambda I| = 0
∣M−λI∣=0
给出
d
×
d
d × d
d×d 矩阵的特征值或特征根。
特征方程是 λ λ λ 的 d d d 阶多项式。 有 d d d 个解, λ 1 , λ 2 , . . . , λ d λ_1, λ_2, . . . , λ_d λ1,λ2,...,λd 。 它们不一定是不同的,可能是实数或复数。
对于每个特征值
λ
i
\lambda_i
λi,其会有关联的特征向量
u
i
u_i
ui, 并满足:
M
u
i
=
λ
i
u
i
Mu_i = \lambda_iu_i
Mui=λiui
若 λ \lambda λ 是 M M M 的 特征值,而 u i u_i ui是属于 λ \lambda λ 的特征向量,则任何对 u i u_i ui 的非零乘都是一个特征向量。
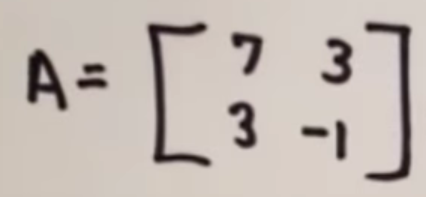
求 矩阵
A
A
A 特征值和特征向量的过程:
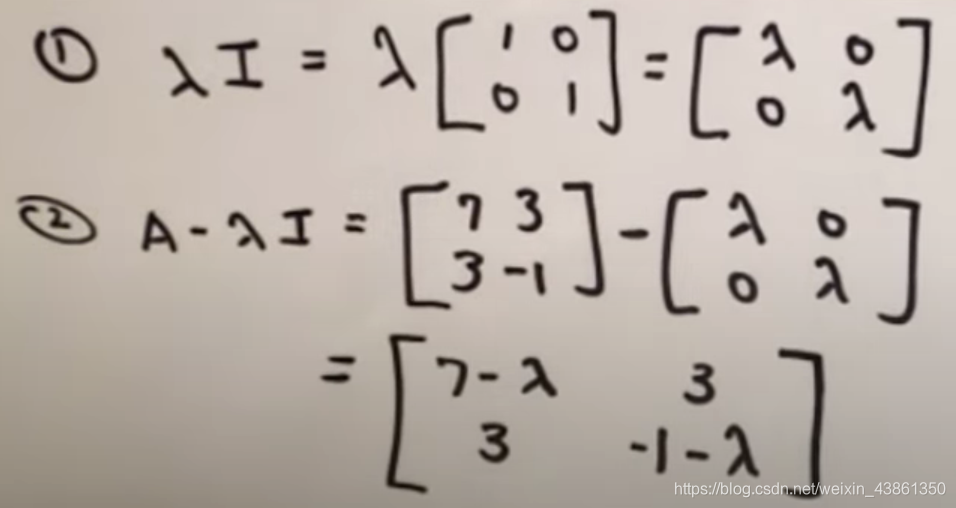
首先让
λ
\lambda
λ 乘以和
A
A
A 大小一致的单位矩阵
I
I
I,得到
λ
I
\lambda I
λI
接着让
A
A
A 减去
λ
I
\lambda I
λI
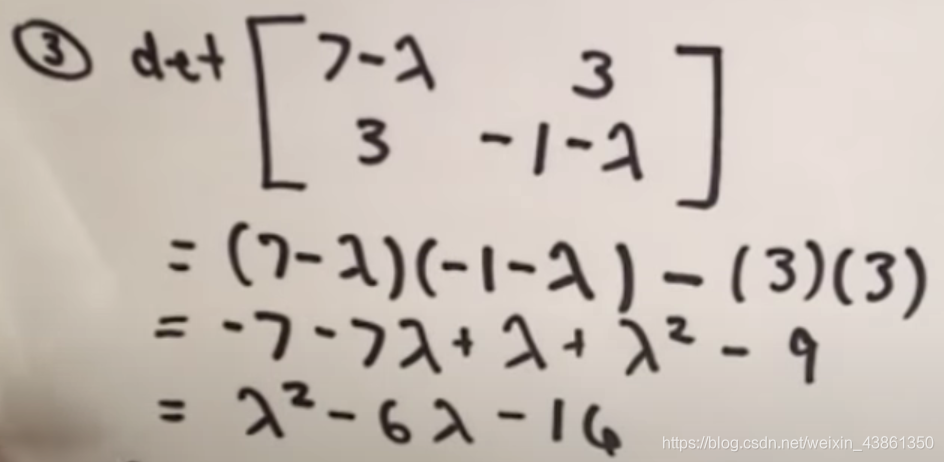
接着,计算上述结果的行列式,即
d
e
t
(
A
−
λ
I
)
det(A - \lambda I)
det(A−λI)
接着 求解
d
e
t
(
A
−
λ
I
)
=
0
det(A - \lambda I) = 0
det(A−λI)=0时,
λ
\lambda
λ的值就可以了。
上述 λ 2 − 6 λ − 14 = 0 \lambda^2 - 6 \lambda - 14 = 0 λ2−6λ−14=0 求解得到特征值 λ 1 = 8 , λ 2 = − 2 \lambda_1 = 8, \lambda_2 = -2 λ1=8,λ2=−2
接下来是特征向量。
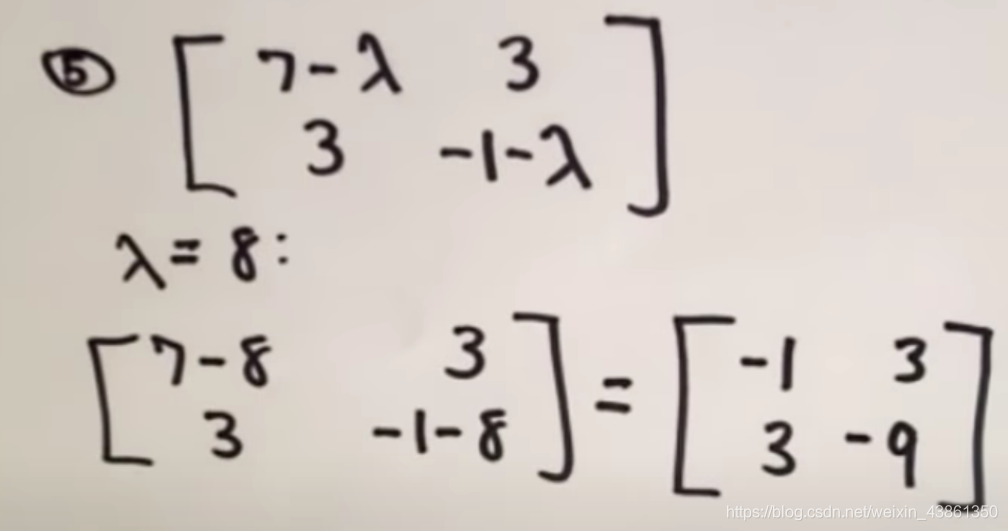
首先代入
λ
\lambda
λ 得到
A
−
λ
I
A - \lambda I
A−λI 的值,以
λ
=
8
\lambda = 8
λ=8 为例
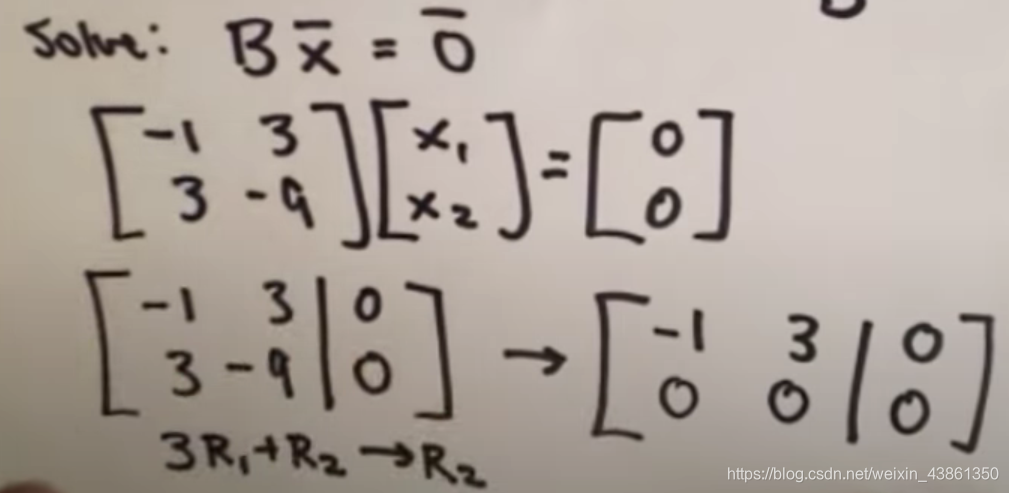
求解
B
x
=
0
Bx = 0
Bx=0 中向量
x
x
x 的可能取值, B 是上图的结果矩阵。
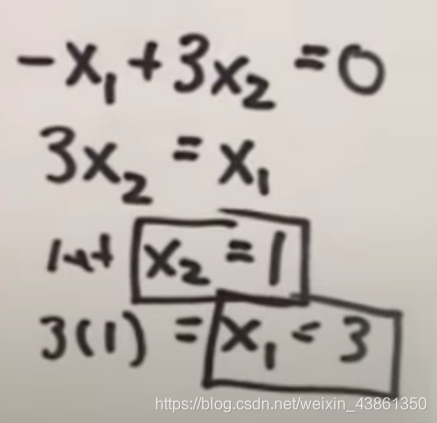
如下图是其中一种解:
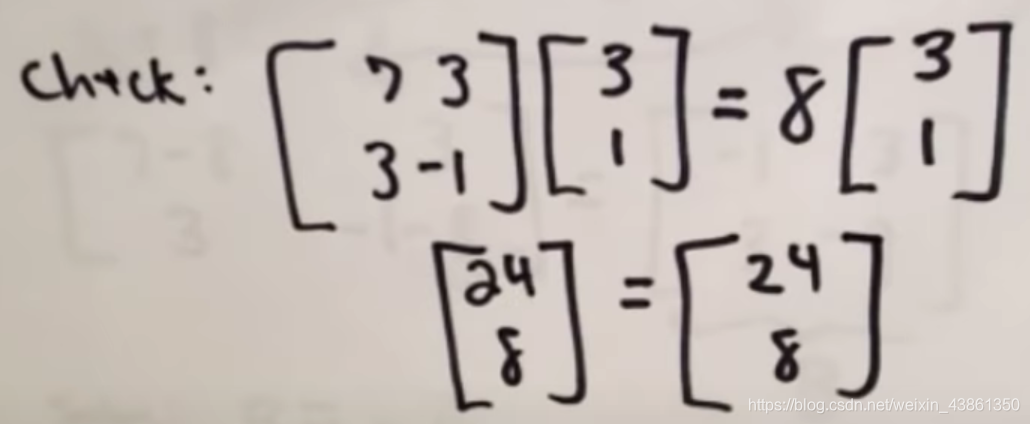
最后根据定义检查结果,结果是对的:
属性
特征值和特征向量在 矩阵 M M M ( d × d d × d d×d) 中的属性:
- 特征值的累积 等于 矩阵 M M M 的行列式。对于一个矩阵,若其特征值都非零,则 M M M 的逆矩阵存在。
- 特征值的累加 等于 矩阵的迹。
- 若 矩阵 M M M 是一个对称矩阵,特征值和特征向量都均为实数。
- 若 矩阵 M M M 具有正定性,所有特征值均大于0。
- 若 矩阵 M M M 具有 m m m 秩的半正定性,其将会有 m m m 个 非零特征值以及 d − m d - m d−m 的零特征值。
- 每一个对称矩阵拥有一些正交特征向量。列是对称矩阵特征值的矩阵 U U U 是正交的。 U = { u 1 , . . . , u d } U = \{u_1, ..., u_d\} U={u1,...,ud}。同时有 U t U = U U t = I U^tU = UU^t = I UtU=UUt=I
- 矩阵
U
U
U 对角化
M
M
M,
U
t
M
U
=
Λ
U^tMU = Λ
UtMU=Λ,其中
Λ
=
d
i
a
g
(
λ
1
,
.
.
.
,
λ
d
)
Λ = diag(\lambda_1, ..., \lambda_d)
Λ=diag(λ1,...,λd),这是一个 项 是
M
M
M 特征值 的 对角矩阵。
- 若 M M M 是正定矩阵,则 M − 1 = U − 1 Λ U t M^{-1} = U^{-1}ΛU^t M−1=U−1ΛUt,并且, Λ − 1 = d i a g ( 1 / λ 1 , . . . , 1 / λ d ) Λ^{-1} = diag(1/ \lambda_1, ..., 1/ \lambda_d) Λ−1=diag(1/λ1,...,1/λd)

















 5832
5832

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









