






 本文深入探讨了最小生成树的概念,介绍了Prim算法和Kruskal算法的实现原理及代码实现,同时讲解了最大关键路径的拓扑排序算法。
本文深入探讨了最小生成树的概念,介绍了Prim算法和Kruskal算法的实现原理及代码实现,同时讲解了最大关键路径的拓扑排序算法。
①定义
最小生成树:针对一个图,使所有节点都连接在一起,需要n-1条边(n为节点),并且所有的边权和为最小的,故连接该n个节点+(n-1)条边为该图的最小生成树。
从而得,一个图如果有最小生成树,则改图一定是联通的
②实现算法
最小生成树的生成算法:
1,Prim算法
该算法类似于dijkstra算法,区别在于dijkstra算法通过vis[]数组中的值是否为1或者0,来保存是否存储过,
而prim算法,使用dist[]距离数组来存储,若dis为0则,该节点已经被选取。
讲到这里,先说一下Prim的原理:
过程:
1.选区任意一个源节点(对最小生成树的构建不会造成影响)
2.将该节点作为一个集合(该集合保存的所有点为已经被访问过的点),找出与该集合直接相连的边权最小的节点,然后将该节点打入集合(方法:就是将源节点到该节点的距离dis更改为0)
3.类似于dijkstra算法,通过刚打入集合的节点,来修改已知的没有访问过的dis[]
具体算法实现代码如下:
const int maxn = 1e5+2;
const int INF = 100000;
int Map[maxn][maxn];
int dis[maxn];
int p[maxn]//记录前驱节点,类似于并查集中的parent数组
void Prime(int x){
for (int i = 1; i<=n; i++){
dis[i] = Map[x][i];
p[i] = i;
}
dis[x] = 0;
int tmp, k, ans = 0,count = 1;
for (int i = 1;i<=n;i++){
tmp = INF;
for (int j = 1; j<=n;j++){
if(dis[j] != 0 && tmp > dis[j]){
tmp = dis[j];
k = j;
}
}
ans += dis[k];
count++;
dis[k] = 0;
for (int j = 1; j <= n;j++){
if(Map[k][j] != INF){
if(dis[j]!=0 && Map[k][j] < dis[j]){
dis[j] = Map[k][j];
p[j] = k;
}
}
}
}
if(count != n){
//说明不存在最小生成树,即该图是不连通的
}else{
cout << ans << endl; //将最下生成树的权值和输出
}
}2.Kruskal算法
Kruskal算法是基于并查集实现的
过程:
1.将所有节点初始化,父亲节点均指向本身(并查集的初始化)
2.将所有边按照权值从小到大排序(sort)
3.从小开始遍历整个结构体数组,针对一个结构体,若边的两个节点的根节点相同,则忽略,继续遍历,,否则将该边权值记录在内
算法代码实现如下:
const int maxn = 1e5 + 2;
struct Node{
int x;
int y;
int data;
}node[maxn];
int parent[maxn];
int n,m;
void Init(){
for (int i = 1; i<=n; i++){
parent[i] = i;
}
}
int find(int x){
return parent[x] == x ? x : parent[x] = find(parent[x]);
}
int cmp(Node &a,Node &b){
return a.data < b.data;
}
int main(){
cin>>n>>m;
for (int i = 1; i<=m;i++){
cin >> node[i].x >> node[i].y >> node[i].data;
}
sort(node+1,node+m+1,cmp);
Init();
int count = 1,x,y,ans = 0;
for (int i = 1; i<=m; i++){
x = find(node[i].x);
y = find(node[i].y);
if(x != y){
ans += node[i].data;
parent[x] = y;
}
}
int tmp = find(1);
for (int i = 2; i<=n; i++){
if(tmp != find(i)){
cout << "-1";
return 0;
}
}
cout << ans;
return 0;
}③最大关键路径(拓扑排序)
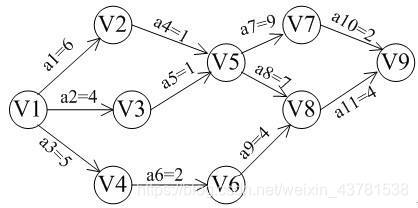
最大关键路径,多指一个工程,需要很多活动,并且每个活动可能存在前驱活动,即当前驱活动不全部满足的情况下,后驱活动无法执行,大概类似下图:
算法实现,主要是获取每个节点的入度和出度。
判断某个节点是否是关键路径上面的节点,通过earl_time[i] 是否等于late_time[i]
通过late_time[j] - earl_time[i] 是否等于 Map[i][j] ,即节点j的最晚开始时间-节点i的最早开始时间 = 节点i和节点j之间边权,即保证了节点i和节点j的自由活动时间为零
具体算法代码如下:(获取一个工程的最早完成时间)
const int maxn = 1e5+2;
const int INF = 100000;
int n,m;
int Map[maxn][maxn];
int earl_time[maxn];
int in_index[maxn]; //保存节点的入度int prev[maxn];
void top_sort(){
queue<int> q; //用来保存入度为0的点
memset(earl_time, 0, sizeof(earl_time));
for (int i = 1; i<=n; i++){
if(in_index[y] == 0)
q.push(y);
}
int tmp,count =0;
while(!q.empty()){
tmp = q.front();
q.pop();
count++;
for (int i = 1; i<=n; i++){
if(Map[tmp][i] != INF){
if(earl[tmp] + Map[tmp][i] > earl_time[i]){
arl_time[i] = earl[tmp] + Map[tmp][i];
}
if(--in_index[i] == 0){
q.push(i);
}
}
}
}
if(count != n){
cout << "0"; //代表该工程无法完成
}else{
int ans = 0;
for (int i = 1;i<=n; i++){
ans = max(ans, earl_time[i]);
}
cout << ans; //将该工程需要消耗最小时间输出
}
}
int main(){
cin>>n>>m;
for (int i = 1; i<=n; i++){
for (int j = 1; j <= n;j++){
Map[i][j] = INF;
}
}
int x, y, len;
for (int i = 1; i<=m; i++){
cin>>x>>y>>len;
Map[x][y] = len;//有向图
in_index[y]++;
}
top_sort();
return 0;
}最后,late_time[] 最晚完成时间的获取,与earl_time[]的获取类似,
不同点在下:
while(!q.empty()){
tmp = q.front();
q.pop();
count++;
for (int i = n; i>=1; i--){ //由于出度为0的点,在工程最后,所以遍历方向是从尾到头
if(Map[i][tmp] != INF){
if(late_time[i] > late_time[tmp] - Map[i][tmp]){
late_time[i] = late_time[tmp] - Map[i][tmp];
}
if(--out_index[i] == 0){ //out_index为保存出度的数组,
q.push(i);
}
}
}
}故获取完所有活动的最早开始时间earl_time[]和最晚开始时间late_time[],故关键路径获取如下:
for (int i = 1; i<=n;i++){
if(earl_time[i] != late_time[i]){
continue;
}
for (int j = n; j >= 1; j--){
if(Map[i][j] != INF && earl_time[j] = late_time[j] && (late_time[j] - earl_time[i] == Map[i][j])){
printf("%d->%d\n", i, j);
}
}
}
















 1029
1029

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









