







【OpenCV】霍夫变换-直线
霍夫直线变换介绍
Hough Line Transform用来做直线检测
前提条件 – 边缘检测已经完成
平面空间到极坐标空间转换
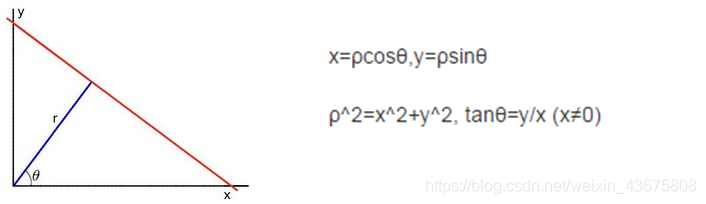
对于任意一条直线上的所有点来说
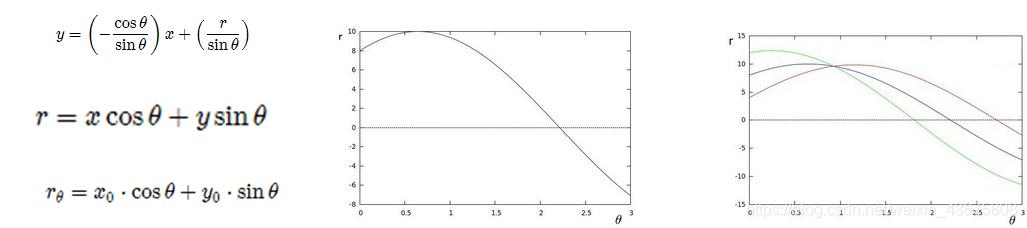
变换到极坐标中,从[0~360]空间,可以得到r的大小
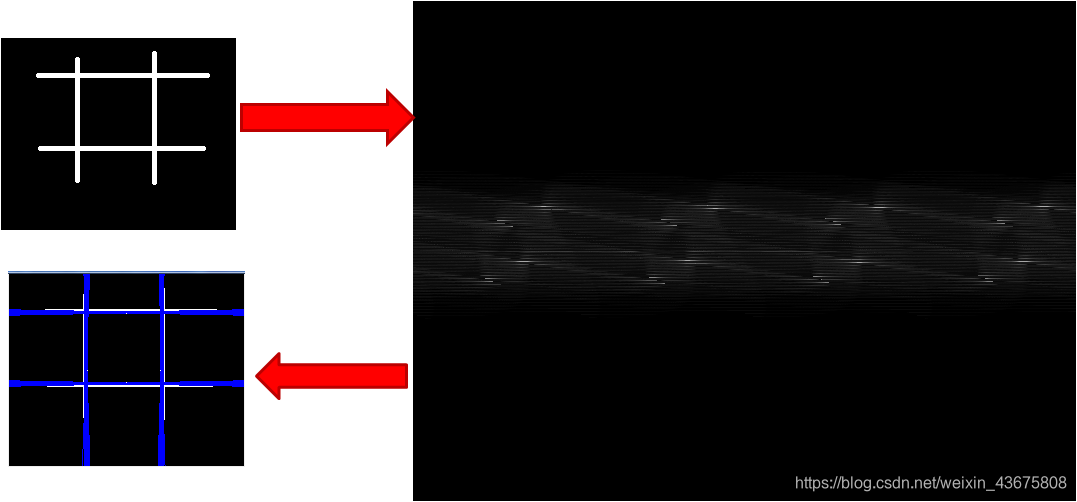
属于同一条直线上点在极坐标空(r, theta)必然在一个点上有最强的信号出现,根据此反算到平面坐标中就可以得到直线上各点的像素坐标,从而得到直线。
从平面坐标变换到霍夫空间(极坐标)
相关API
1、 标准的霍夫变换 cv::HoughLines从平面坐标转换到霍夫空间,最终输出是  表示极坐标空间
表示极坐标空间
cv::HoughLines(
InputArray src, // 输入图像,必须8-bit的灰度图像
OutputArray lines, // 输出的极坐标来表示直线
double rho, // 生成极坐标时候的像素扫描步长
double theta, //生成极坐标时候的角度步长,一般取值CV_PI/180
int threshold, // 阈值,只有获得足够交点的极坐标点才被看成是直线
double srn=0;// 是否应用多尺度的霍夫变换,如果不是设置0表示经典霍夫变换
double stn=0;//是否应用多尺度的霍夫变换,如果不是设置0表示经典霍夫变换
double min_theta=0; // 表示角度扫描范围 0 ~180之间, 默认即可
double max_theta=CV_PI
)
// 一般情况是有经验的开发者使用,需要自己反变换到平面空间
2、霍夫变换直线概率 cv::HoughLinesP最终输出是直线的两个点
cv::HoughLinesP(
InputArray src, // 输入图像,必须8-bit的灰度图像
OutputArray lines, // 输出的极坐标来表示直线
double rho, // 生成极坐标时候的像素扫描步长,一般取1
double theta, //生成极坐标时候的角度步长,一般取值CV_PI/180
int threshold, // 阈值,只有获得足够交点的极坐标点才被看成是直线,一般取10
double minLineLength=0;// 最小直线长度
double maxLineGap=0;// 最大间隔
)
代码实现
#include<opencv2/opencv.hpp>
#include<iostream>
#include<math.h>
using namespace cv;
using namespace std;
int main(int argc, char** argv)
{
Mat src, gray_src, dst;
src = imread("1.jpg");
if (src.empty()) {
cout << "can not load the image..." << endl;
return -1;
}
char input_title[] = "input";
char output_title[] = "houghlines_demo";
namedWindow(input_title, CV_WINDOW_AUTOSIZE);
imshow(input_title, src);
Canny(src, gray_src, 100, 200, 3);
imshow("edge image", gray_src);
imwrite("edge image.jpg", gray_src);
cvtColor(gray_src, dst, CV_GRAY2BGR);
vector<Vec4f>plines;
HoughLinesP(gray_src, plines, 1, CV_PI / 180.0, 10, 0, 10);
Scalar color = Scalar(0, 255, 0);
for (size_t i = 0; i < plines.size(); i++) {
Vec4f hline = plines[i];
line(dst, Point(hline[0], hline[1]), Point(hline[2], hline[3]), color, 3,LINE_AA);
}
imshow(output_title, dst);
imwrite("HoughlineP_demo.jpg", dst);
waitKey(0);
return 0;
}
实验结果
原图
边缘检测
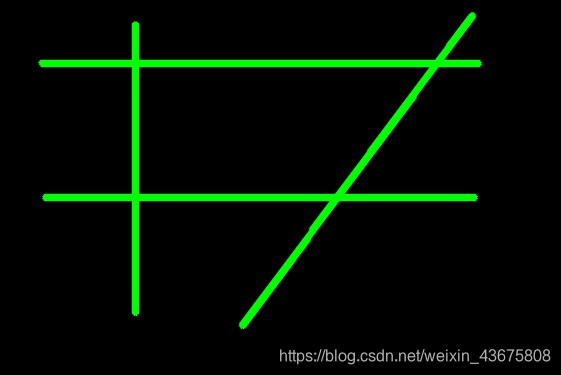
HoughLineP


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









