







 本文深入探讨了图像处理中的模糊技术,重点介绍了中值滤波和双边滤波两种方法。中值滤波能有效去除椒盐噪声,而双边滤波则在保留边缘信息的同时平滑图像,避免了传统模糊方法的缺陷。文章提供了详细的OpenCV实现代码,并展示了处理前后图像的对比效果。
本文深入探讨了图像处理中的模糊技术,重点介绍了中值滤波和双边滤波两种方法。中值滤波能有效去除椒盐噪声,而双边滤波则在保留边缘信息的同时平滑图像,避免了传统模糊方法的缺陷。文章提供了详细的OpenCV实现代码,并展示了处理前后图像的对比效果。
【OpenCV】图像模糊(2)——中值滤波、双边滤波
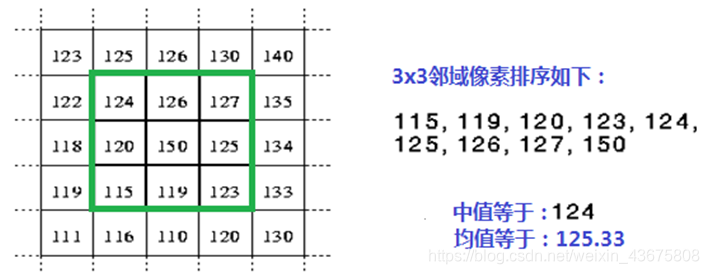
中值滤波
-
统计排序滤波器
-
中值对椒盐噪声有很好的抑制作用
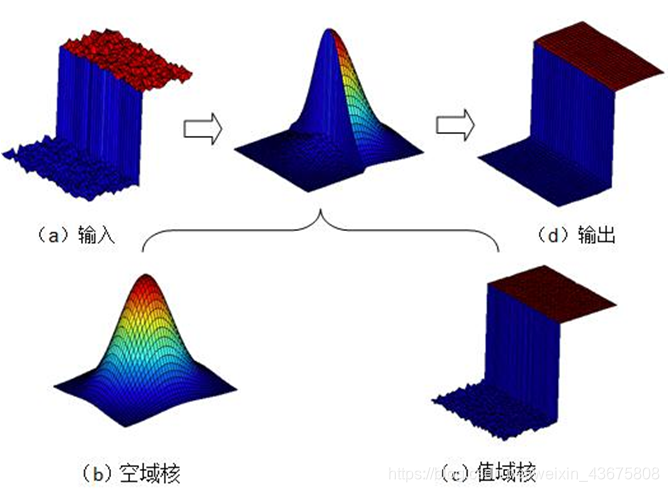
双边滤波
(1) 均值模糊无法克服边缘像素信息丢失缺陷。原因是均值滤波是基于平均权重
(2)高斯模糊部分克服了该缺陷,但是无法完全避免,因为没有考虑像素值的不同
(3) 高斯双边模糊 – 是边缘保留的滤波方法,避免了边缘信息丢失,保留了图像轮廓不变
相关API
中值模糊medianBlur(Mat src, Mat dest, ksize)
双边模糊bilateralFilter(src, dest, d=15, 150, 3);(1) 15 :计算的半径,半径之内的像数都会被纳入计算,如果提供-1 则根据sigma space参数取值
(2)150 :sigma color 决定多少差值之内的像素会被计算
(3) 3 :sigma space 如果d的值大于0则声明无效,否则根据它来计算d值
中值模糊的ksize大小必须是大于1而且必须是奇数。
代码实现
#include<opencv2/opencv.hpp>
#include<iostream>
#include<math.h>
using namespace cv;
using namespace std;
int main(int argc, char**argv)
{
Mat src;
src = imread("1.jpg");
if (!src.data) {
cout << "could not load the image..." << endl;
return -1;
}
namedWindow("input", CV_WINDOW_AUTOSIZE);
imshow("input", src);
Mat dst;
medianBlur(src, dst, 11);//中值滤波
imshow("medianBlur", dst);
imwrite("medianBlur.jpg", dst);
Mat src2;
src2 = imread("2.jpg");
if (!src2.data) {
cout << "could not load the image..." << endl;
return -1;
}
namedWindow("input2", CV_WINDOW_AUTOSIZE);
imshow("input2", src2);
Mat dst2;
bilateralFilter(src2, dst2, 15, 150, 10);//双边滤波
imshow("bilateralFilter", dst2);
imwrite("bilateralFilter.jpg", dst2);
Mat dst3;
Mat kernel=(Mat_<int>(3, 3) << 0, -1, 0, -1, 5, -1, 0, -1, 0);
filter2D(dst2, dst3, -1, kernel, Point(-1, -1), 0);//双边滤波的结果拿过来做filter2D
imshow("filter2D again", dst3);
imwrite("filter2D again.jpg", dst3);
waitKey(0);
return 0;
}
实验效果图
带有噪声的熙熙照片(对不起啦我的宝宝,给你的脸上加了这么多瑕疵)

中值滤波后(熙熙又漂亮啦)

原图

双边滤波

接下来再filter2d



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









