







 超级会员免费看
超级会员免费看
前言
从R-CNN到Fast-RCNN,之前的目标检测工作都是分成两阶段,先提供位置信息在进行目标分类,精度很高但无法满足实时检测的要求。
而YoLo将目标检测看作回归问题,输入为一张图片,输出为S*S*(5*B+C)的三维向量。该向量结果既包含位置信息,又包含类别信息。可通过损失函数,将目标检测与分类同时进行,能够满足实时性要求。
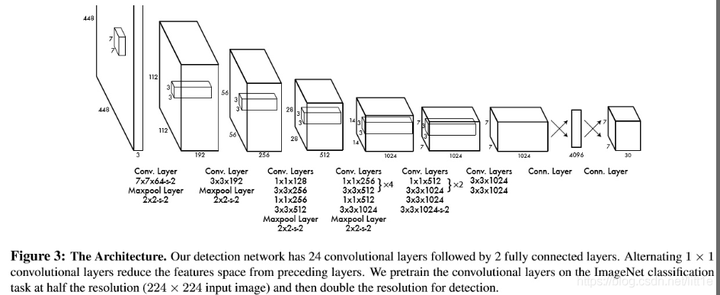
接下来给出YOLOV1的网络结构图
核心思想
YOLO将目标检测问题作为回归问题。会将输入图像分为S*S的网格,如果一个物体的中心点落到一个cell中,那么该cell就要负责预测该物体,一个格子只能预测一个物体,同时会生成B个预测框。
对于每个cell:
-
含有B个预测边界框,这些框大小尺寸等等都随便,只有一个要求,就是生成框的中心点必须在cell中,每个框都有一个置信度分数(confidence score)。这些框的置信度分数反映了该模型对某个框内是否含有目标的置信度ÿ

 订阅专栏 解锁全文
订阅专栏 解锁全文




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











