







 本文介绍了一种先进的目标检测方法,该方法通过预测潜在目标中心位置及尺度纵横比,提高了检测效率。不同于传统固定锚点,此方法自适应生成锚点,通过识别可能含目标的子区域,预测每个位置的尺度和纵横比,实现更精准的目标检测。
本文介绍了一种先进的目标检测方法,该方法通过预测潜在目标中心位置及尺度纵横比,提高了检测效率。不同于传统固定锚点,此方法自适应生成锚点,通过识别可能含目标的子区域,预测每个位置的尺度和纵横比,实现更精准的目标检测。
最先进的探测器主要依赖于密集锚定方案,其中锚点在空间域上均匀采样,具有一组预定义的尺度和纵横比。我们提出的方法联合预测可能存在感兴趣对象的中心的位置以及不同位置处的尺度和纵横比。提高效率。
以前的锚和目标不像的假设设置的太多了,所有目标是得到一个更加有效果的可以学习形状的锚。由于目标不是均匀分布在图像上我们提出更加有效的准备的锚,首先识别可能包含对象的子区域,然后确定不同位置的形状。通过预测尺度和纵横比来代替预先设置的固定的锚,所有尺度和纵横比是变化的,不同的特征映射像素必须学习适合响应锚点的自适应表示(原来的特征映射出去一样大小的锚)。
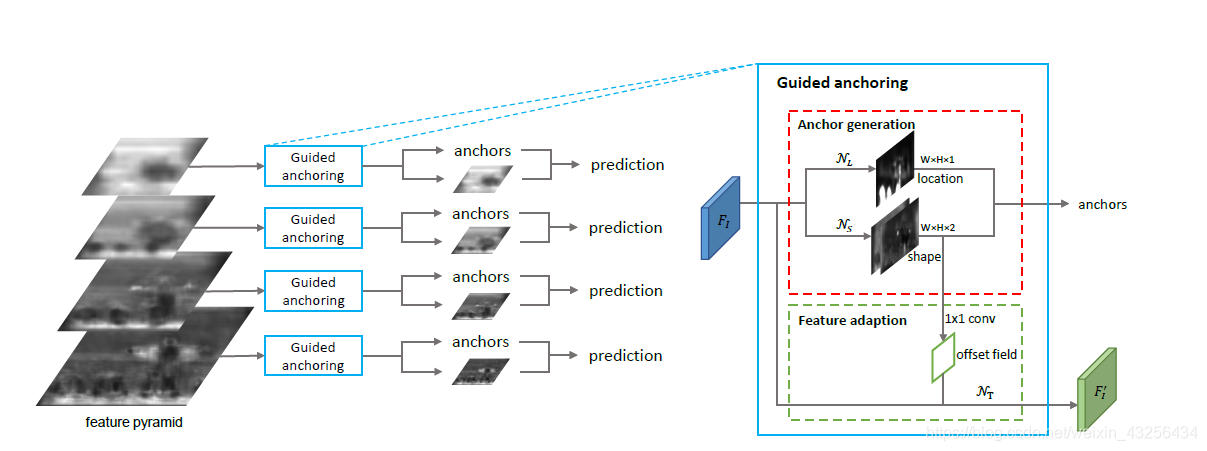
该指导锚有两个分支,下面分别讲下自己的理解。
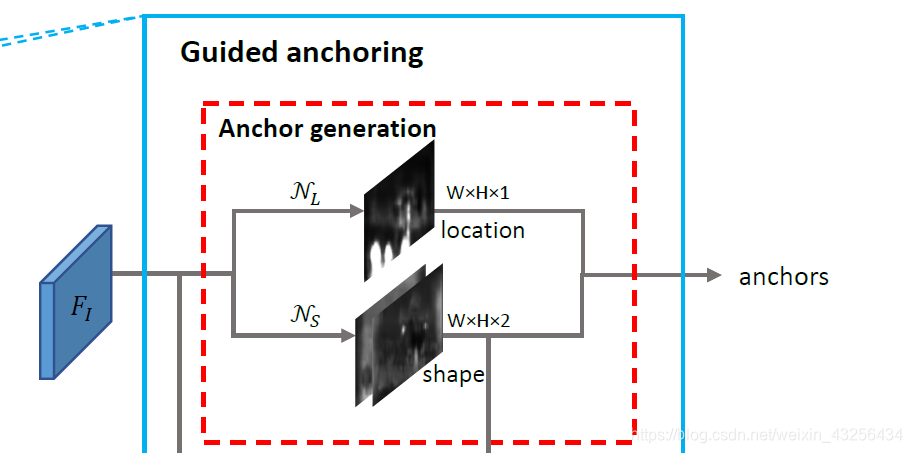
其中F1是提取的特征图,有两个分支,一个分支使用1x1的卷积产生的位置概率图。一个是确定尺度。通过选择预测概率在某些阈值上的位置,和这些位置最优可能的形状,我们生成一系列的锚。
在识别位置后,决定尺度。这个分支和卷积边框回归不同,因为这不会改变锚的位置,不会使锚和锚的特征不对齐。具体的,这个分支会对给出的特征图,对每个位置预测尺度。可以通过最近的地面真实边界框得到最高覆盖范围的尺度。
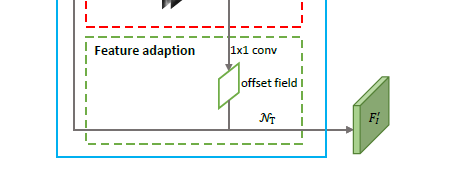
常规的RPN或者单级检测器采用滑动窗口,特征图上的锚是统一的。在每个位置共享尺度形状。所以特征图可以学习一致的代表。我们方法,锚的形状因为位置变化,大的锚的特征应该在大的区域内被编码。使用3x3的变形卷积实现Nt,我们先从锚的尺度预测偏移,应用变形卷积到原始特征和偏移特征。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









