







 本文详细解析了如何利用线段树与扫描线算法解决矩形周长并的问题,通过离散化处理与结构体设计,实现了对多个矩形轮廓周长的有效计算。
本文详细解析了如何利用线段树与扫描线算法解决矩形周长并的问题,通过离散化处理与结构体设计,实现了对多个矩形轮廓周长的有效计算。
Picture poj 1177
题意
给出n个矩形的左下角坐标和右上角坐标,让求n个矩形形成的不规则图形的轮廓周长,即矩形周长并。
题解
线段树+扫描线。
一般扫描线都会离散化。
先算与x轴平行的轮廓,对于与y轴平行的类似于x轴的。
首先我们把所有的与x轴平行的直线搞到结构体中,如果是矩形的下边,给它一个id为1,上边id为-1。
按照边的高度从小到大排序。
线段树中维护的信息有
struct Tree
{
int tag,sum;//tag表示这个节点所表示的线段被完整覆盖了几次,sum表示这个节点所表示的线段被覆盖的长度。
} node[N*4];
遍历所有的边,并更新到线段树中,如果这条边的id是1,相当于把这个线段更新到线段树中,如果是-1,相当于把这个线段从线段树中抹去。
那么当前线段贡献的周长是,当前的总长度减去上一次的总长度 的绝对值(自己模拟一下就理解了)
假设有2个矩形如下:
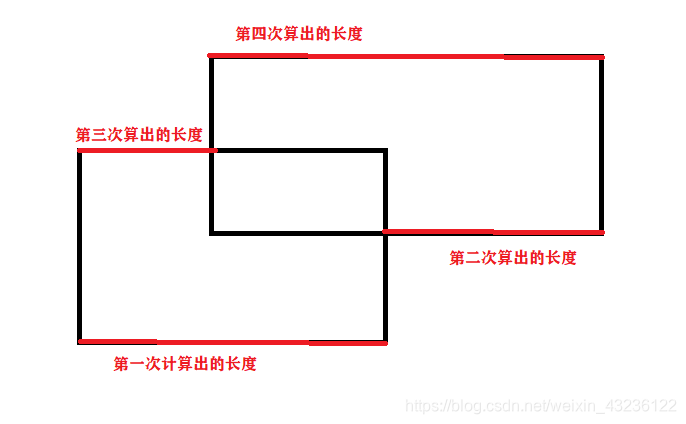
y轴就跟x轴一样,再做一遍上述操作就可以了。
代码
//#include<bits/stdc++.h>
#include<math.h>
#include<stdio.h>
#include<iostream>
#include<string.h>
#include<algorithm>
#include<vector>
#define pb push_back
using namespace std;
typedef long long ll;
typedef unsigned long long ull;
const int N=1e4+10;
const float PI =acos(-1.0);
const int mod=1e9+7;
const int inf=0x3f3f3f3f;
struct seg
{
int l,r,h,id;
seg() {}
seg(int a,int b,int c,int d):l(a),r(b),h(c),id(d) {}
bool operator <(const seg& a)const
{
return h<a.h;
}
} arr[2][N];
vector<int>vec[2];
int getid(int x,int pos)
{
return lower_bound(vec[pos].begin(),vec[pos].end(),x)-vec[pos].begin()+1;
}
struct Tree
{
int tag,sum;
} node[N*4];
void pushup(int rt,int l,int r,int p)
{
if(node[rt].tag) node[rt].sum=vec[p][r]-vec[p][l-1];//如果tag大于0说明此此线段至少被覆盖一次,长度就是区间的长度
else node[rt].sum=node[rt*2].sum+node[rt*2+1].sum;
}
void update(int rt,int l,int r,int qs,int qe,int id,int p)
{
if(qs<=l&&qe>=r)
{
node[rt].tag+=id;
pushup(rt,l,r,p);//这里也必须使用pushup,因为如果这次更新变成0了,还需要使用子节点的长度来更新
return;
}
int mid=(l+r)/2;
if(qs<=mid) update(rt*2,l,mid,qs,qe,id,p);
if(qe>mid) update(rt*2+1,mid+1,r,qs,qe,id,p);
pushup(rt,l,r,p);
}
int main()
{
int n;
while(~scanf("%d",&n))
{
for(int i=1; i<=n; i++)
{
int x1,y1,x2,y2;
scanf("%d%d%d%d",&x1,&y1,&x2,&y2);
vec[0].pb(x1),vec[0].pb(x2);//vector用于离散化
vec[1].pb(y1),vec[1].pb(y2);
arr[0][i]=seg(x1,x2,y1,1);//获取线段
arr[0][i+n]=seg(x1,x2,y2,-1);
arr[1][i]=seg(y1,y2,x1,1);
arr[1][i+n]=seg(y1,y2,x2,-1);
}
n<<=1;
sort(arr[1]+1,arr[1]+1+n);//对线段按照高度排序
sort(arr[0]+1,arr[0]+1+n);
sort(vec[0].begin(),vec[0].end());//对要离散化的点进行排序
sort(vec[1].begin(),vec[1].end());
vec[0].erase(unique(vec[0].begin(),vec[0].end()),vec[0].end());
vec[1].erase(unique(vec[1].begin(),vec[1].end()),vec[1].end());//删除vector重复的点
int ans=0;
for(int i=0; i<2; i++)
{
int now=0,pre=0;
memset(node,0,sizeof(node));
for(int j=1; j<=n; j++)
{
int l=getid(arr[i][j].l,i);//获取离散化后的值
int r=getid(arr[i][j].r,i);
if(l<r) update(1,1,vec[i].size(),l,r-1,arr[i][j].id,i);//为什么使用的是r-1?
//因为有l==r的区间,这样区间长度为0,所以我们让每个区间表示[l,r+1]的长度,这样更新的时候就需要更新[l,r-1]。
//上面的pushup时完整区间的长度就是算的[l,r+1],这是对于r-1较好的解释了
ans+=abs(node[1].sum-pre);//差值是贡献,模拟一下就知道了
pre=node[1].sum;
}
}
printf("%d\n",ans);
}
return 0;
}
/*
7
-15 0 5 10
-5 8 20 25
15 -4 24 14
0 -6 16 4
2 15 10 22
30 10 36 20
34 0 40 16
*/
关于更新时r-1的解释参考博客链接

















 1321
1321

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









