







Smith预估控制原理(Smith Predictor Control)是一种针对时滞(Lag)系统解决控制器设计问题的方法。所谓时滞系统,指的是对于某个变量的控制作用要经过一段时间的延迟,比如在机电系统中,马达的转速与控制器的调节之间存在一定的时间滞后。
具有死区时间的系统的传递函数为:
τ 是系统死区时间。
Gp(s) 是过程模型。
Gf(s) 是预测误差滤波器。
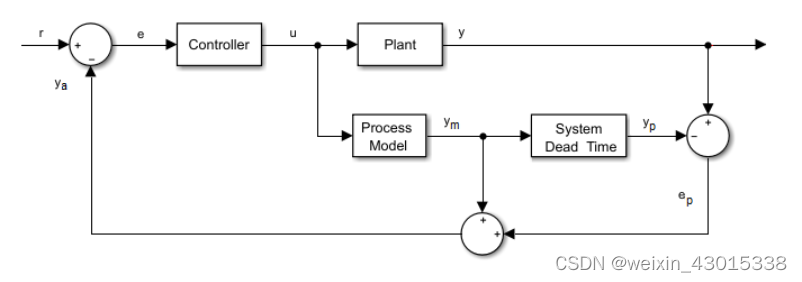
Smith 预估控制器模块通过在离散时间内实现 Smith 死区时间 PI 控制结构来补偿死区时间。下图给出了了该模块的控制原理图:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











