



- 接入hdmi接口的屏幕, 开机密码:khadas
- 进入设置,连接WIFI,重启后即可拔掉屏幕,使用windows电脑远程连接
- windows电脑内下载nomachine,在同一WIFI下连接无人机机载电脑
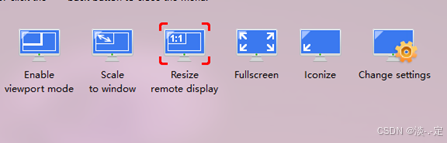
重置桌面分辨率:

进入Display,点击resize remote display,回到桌面。
打开遥控器,将所有拨杆拨到上方位置

4.点击左侧栏终端图标,进入终端,输入以下命令
bash launch_driver.sh
5.从桌面左侧打开一个新终端(按住shift,点击终端图标)
注意:输入这个命令之前打开遥控器!!!
bash stereo.sh
6.从桌面左侧打开一个新终端(按住shift,点击终端图标)
roslaunch planning sjtu_drone.launch
7.准备起飞
将下图遥控器SWC模式拨杆拨到中间,等待2s左右后,将该开关拨到下方,无人机将自动起飞
注意:无人机上电后谨慎拨动模式拨杆,可能会导致误起飞!!!!
注意:无人机上电后谨慎拨动模式拨杆,可能会导致误起飞!!!!
注意:无人机上电后谨慎拨动模式拨杆,可能会导致误起飞!!!!

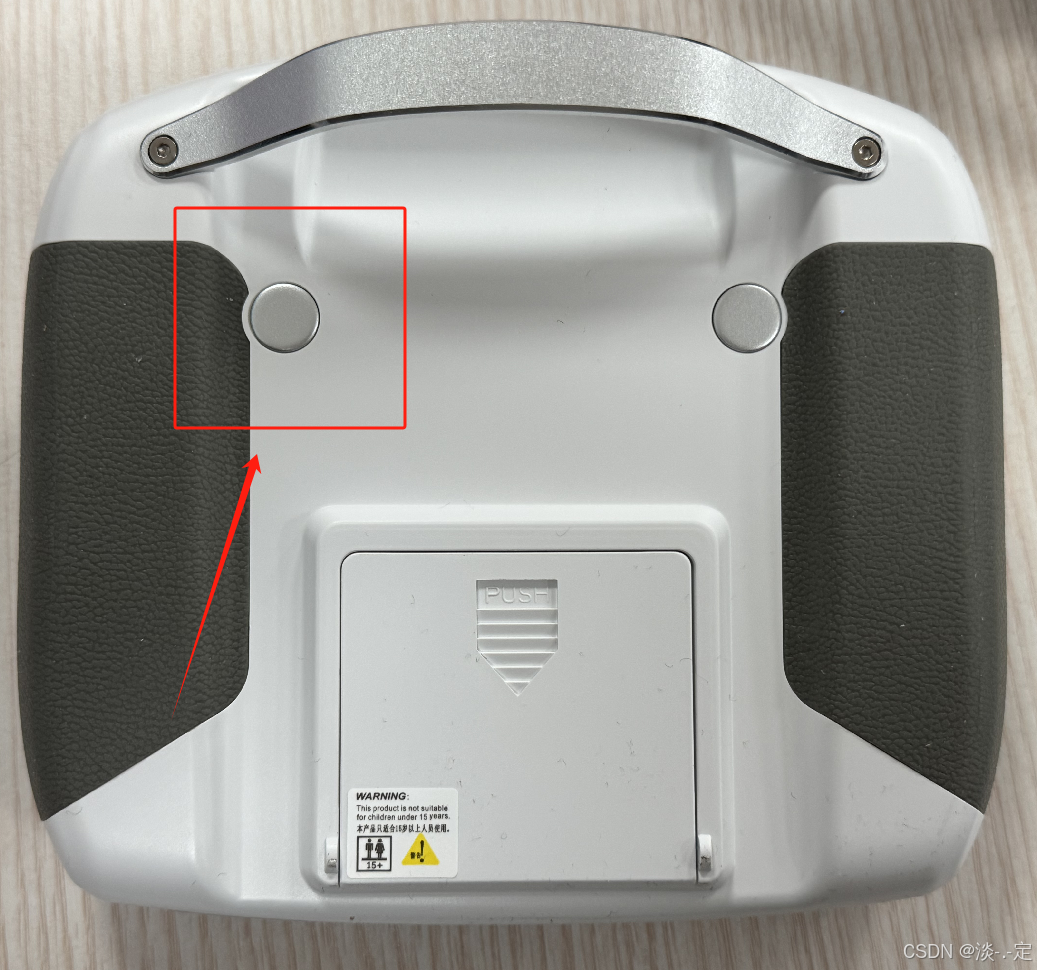
无人机起飞后进入悬停模式,操作者走到无人机前方,按下遥控器背后按钮,开始自动跟踪。
注意:
如遇紧急情况,可切换到SWC模式拨杆拨动到最上方,无人机将进入自稳模式
如遇突发情况需要让无人机空中停桨,可拨动遥控器左上角的SWA至下方
停桨后无人机将进入自由落体,谨慎操作!!!
停桨后无人机将进入自由落体,谨慎操作!!!
停桨后无人机将进入自由落体,谨慎操作!!!
完成跟踪后,将SWC拨到中间,手动控制油门降落,落地后将SWA拨到下方,锁定无人机。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









