 深度学习之机器视觉
深度学习之机器视觉




 本文深入探讨了机器视觉中的关键概念和技术,包括图像分类、物体检测、风格迁移、边缘检测和三维立体卷积。详细讲解了卷积神经网络(CNN)的工作原理,包括单层卷积神经网络的结构、参数计算、激活函数的使用,以及池化层的作用。并通过实例展示了CNN在网络设计中的应用。
本文深入探讨了机器视觉中的关键概念和技术,包括图像分类、物体检测、风格迁移、边缘检测和三维立体卷积。详细讲解了卷积神经网络(CNN)的工作原理,包括单层卷积神经网络的结构、参数计算、激活函数的使用,以及池化层的作用。并通过实例展示了CNN在网络设计中的应用。
机器视觉
机器视觉(Computer Vision)是深度学习应用的主要方向之一。一般的CV问题包括以下三类:
-
Image Classification
-
Object detection
-
Neural Style Transfer
1.边缘检测
对于CV问题,我们在之前的笔记中介绍过,神经网络由浅层到深层,分别可以检测出图片的边缘特征 、局部特征(例如眼睛、鼻子等)、整体面部轮廓。

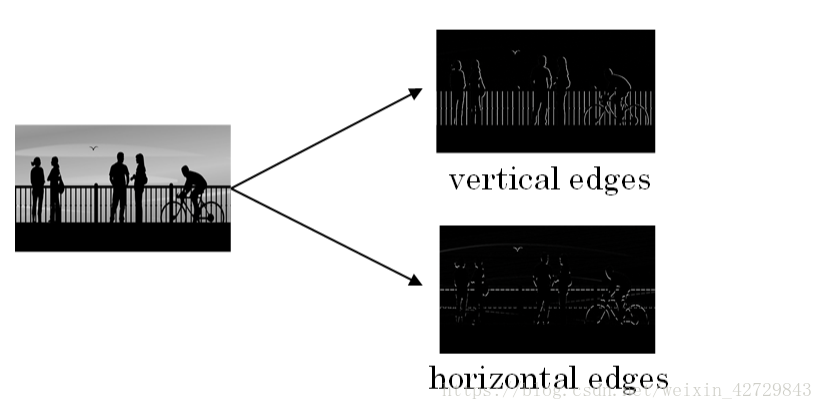
这一小节我们将介绍如何检测图片的边缘。
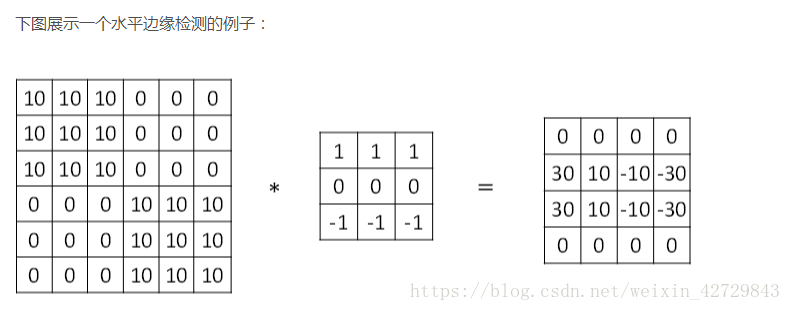
最常检测的图片边缘有两类:一是垂直边缘(vertical edges),二是水平边缘(horizontal edges)。

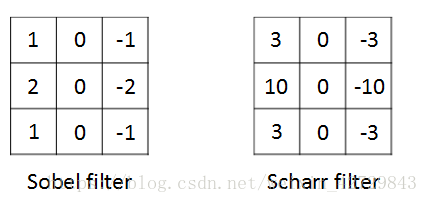
除了上面提到的这种简单的Vertical、Horizontal滤波器之外,还有其它常用的filters,例如Sobel filter和Scharr filter。这两种滤波器的特点是增加图片中心区域的权重。
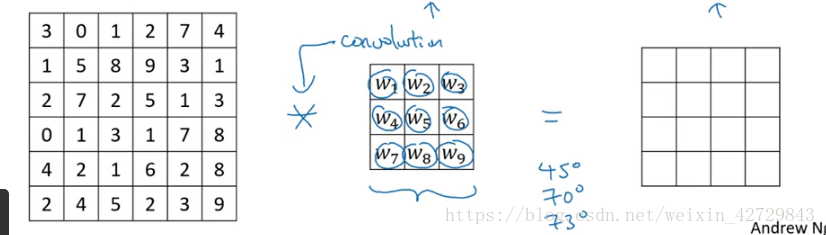
在深度学习中,如果我们想检测图片的各种边缘特征,而不仅限于垂直边缘和水平边缘,那么filter的数值一般需要通过模型训练得到,类似于标准神经网络中的权重W一样由梯度下降算法反复迭代求得。CNN(卷积神经网络)的主要目的就是计算出这些filter的数值。确定得到了这些filter后,CNN浅层网络也就实现了对图片所有边缘特征的检测。

2.三维立体卷积
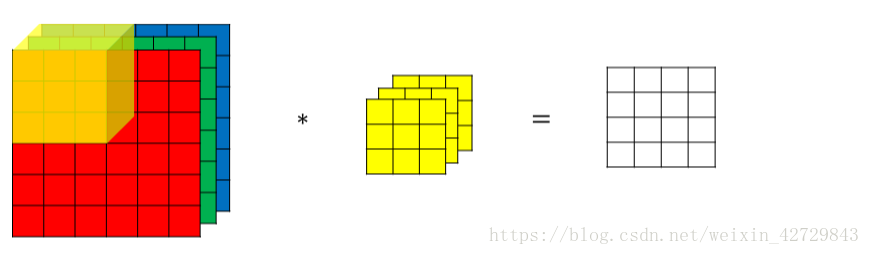
对于3通道的RGB图片,其对应的滤波器算子同样也是3通道的。例如一个图片是6 x 6 x 3,分别表示图片的高度(height)、宽度(weight)和通道(#channel)。
3通道图片的卷积运算与单通道图片的卷积运算基本一致。过程是将每个单通道(R,G,B)与对应的filter进行卷积运算求和,然后再将3通道的和相加,得到输出图片的一个像素值。
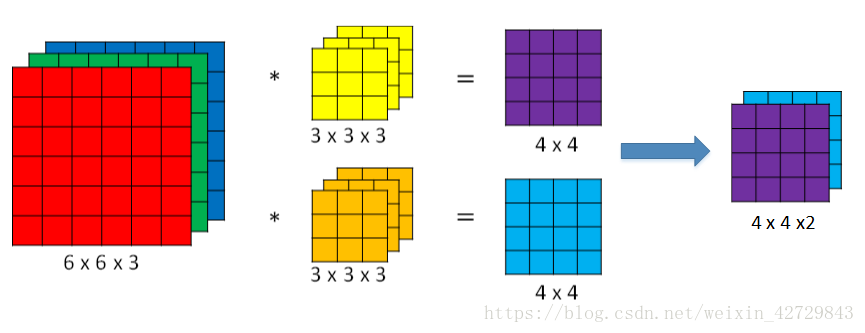
不同通道的滤波算子可以不相同。例如R通道filter实现垂直边缘检测,G和B通道不进行边缘检测,全部置零,或者将R,G,B三通道filter全部设置为水平边缘检测。
为了进行多个卷积运算,实现更多边缘检测,可以增加更多的滤波器组监测不同的特征。例如设置第一个滤波器组实现垂直边缘检测,第二个滤波器组实现水平边缘检测。这样,不同滤波器组卷积得到不同的输出,个数由滤波器组决定。
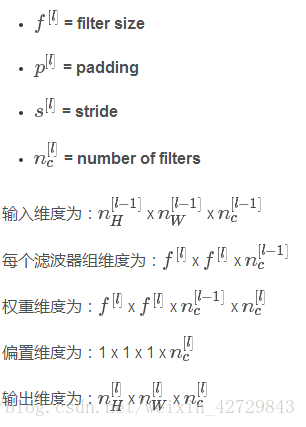
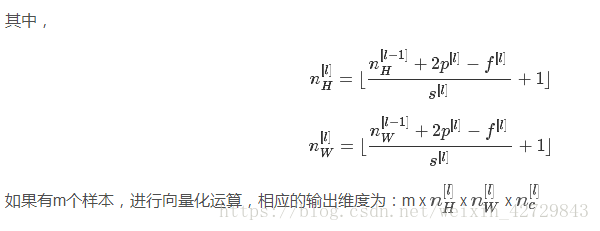
总结:
其中表示通道数,
表示使用滤波器的数量
3.单层卷积神经网络
卷积神经网络的单层结构如下所示:
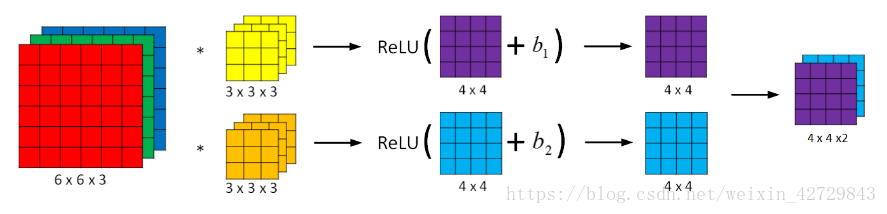
相比之前的卷积过程,CNN的单层结构多了激活函数ReLU和偏移量b。整个过程与标准的神经网络单层结构非常类似:
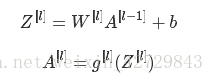
卷积运算对应着上式中的乘积运算,滤波器组数值对应着权重W[l],所选的激活函数为ReLU。
我们来计算一下上图中参数的数目:每个滤波器组有3x3x3=27个参数,还有1个偏移量b,则每个滤波器组有27+1=28个参数,两个滤波器组总共包含28x2=56个参数。我们发现,选定滤波器组后,参数数目与输入图片尺寸无关。所以,就不存在由于图片尺寸过大,造成参数过多的情况。例如一张1000x1000x3的图片,标准神经网络输入层的维度将达到3百万,而在CNN中,参数数目只由滤波器组决定,数目相对来说要少得多,这是CNN的优势之一。
最后,我们总结一下CNN单层结构的所有标记符号,设层数为。
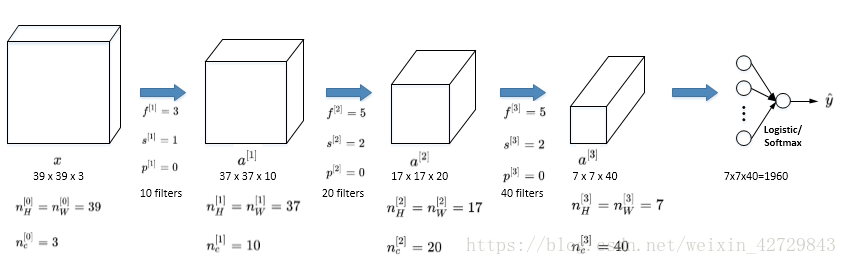
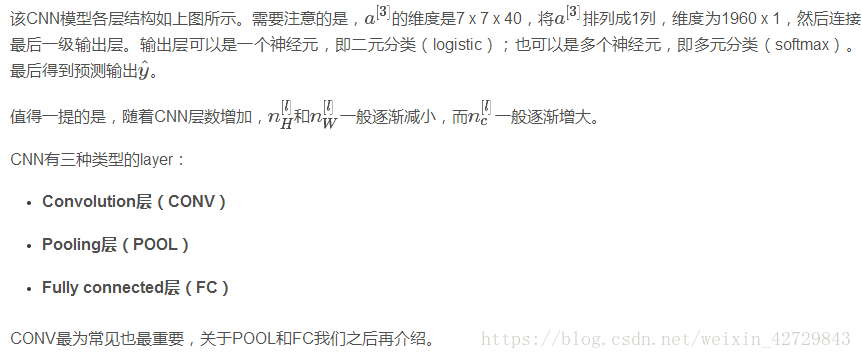
4.简单卷积神经网络例子
下面介绍一个简单的CNN网络模型:
5.pooling层
Pooling layers是CNN中用来减小尺寸,提高运算速度的,同样能减小noise影响,让各特征更具有健壮性。
Pooling layers的做法比convolution layers简单许多,没有卷积运算,仅仅是在滤波器算子滑动区域内取最大值,即max pooling,这是最常用的做法。注意,pooling层没有参数,且超参数p很少在pooling layers中使用,基本上只有超参数f和s。
Max pooling的好处是只保留区域内的最大值(特征),忽略其它值,降低noise影响,提高模型健壮性。而且,max pooling需要的超参数仅为滤波器尺寸f和滤波器步进长度s,没有其他参数需要模型训练得到,计算量很小。
如果是多个通道,那么就每个通道单独进行max pooling操作。
除了max pooling之外,还有一种做法:average pooling。顾名思义,average pooling就是在滤波器算子滑动区域计算平均值。

实际应用中,max pooling比average pooling更为常用。
6.卷积神经网络例子
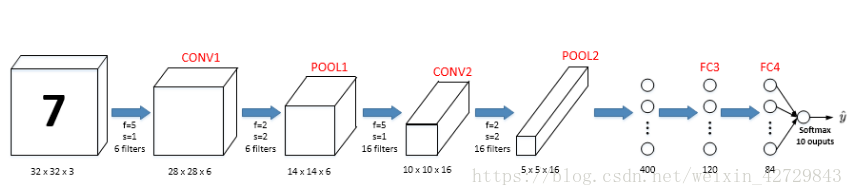
图中,CON层后面紧接一个POOL层,CONV1和POOL1构成第一层,CONV2和POOL2构成第二层。特别注意的是FC3和FC4为全连接层FC,它跟标准的神经网络结构一致。最后的输出层(softmax)由10个神经元构成。
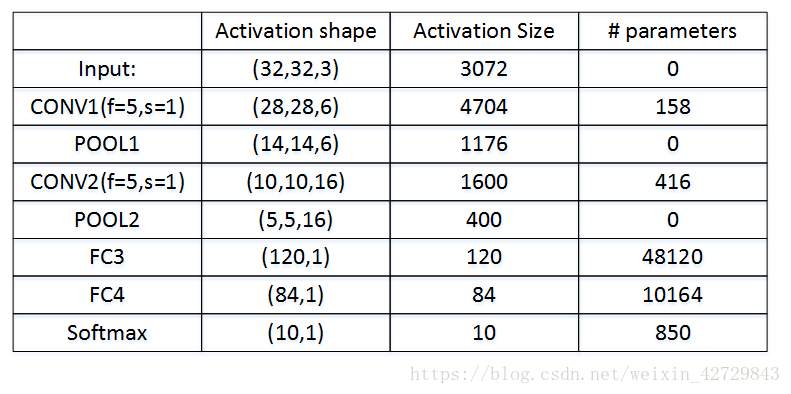
整个网络各层的尺寸和参数如下表格所示:
7.为什么使用卷积
相比标准神经网络,CNN的优势之一就是参数数目要少得多。参数数目少的原因有两个:
-
参数共享:一个特征检测器(例如垂直边缘检测)对图片某块区域有用,同时也可能作用在图片其它区域。
-
连接的稀疏性:因为滤波器算子尺寸限制,每一层的每个输出只与输入部分区域内有关。
除此之外,由于CNN参数数目较小,所需的训练样本就相对较少,从而一定程度上不容易发生过拟合现象。而且,CNN比较擅长捕捉区域位置偏移。也就是说CNN进行物体检测时,不太受物体所处图片位置的影响,增加检测的准确性和系统的健壮性。

















 1179
1179

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









