







 这篇博客详细介绍了镜头技术的基础参数,包括视场、倍率、工作距离、焦距、光圈、数值孔径、景深、相对照度、远心光路、畸变、分辨率和MTF等关键概念。讨论了镜头与相机的匹配原则,以及这些参数如何影响视觉系统的性能和测量精度。
这篇博客详细介绍了镜头技术的基础参数,包括视场、倍率、工作距离、焦距、光圈、数值孔径、景深、相对照度、远心光路、畸变、分辨率和MTF等关键概念。讨论了镜头与相机的匹配原则,以及这些参数如何影响视觉系统的性能和测量精度。
文章目录
参考文献
木桶效应
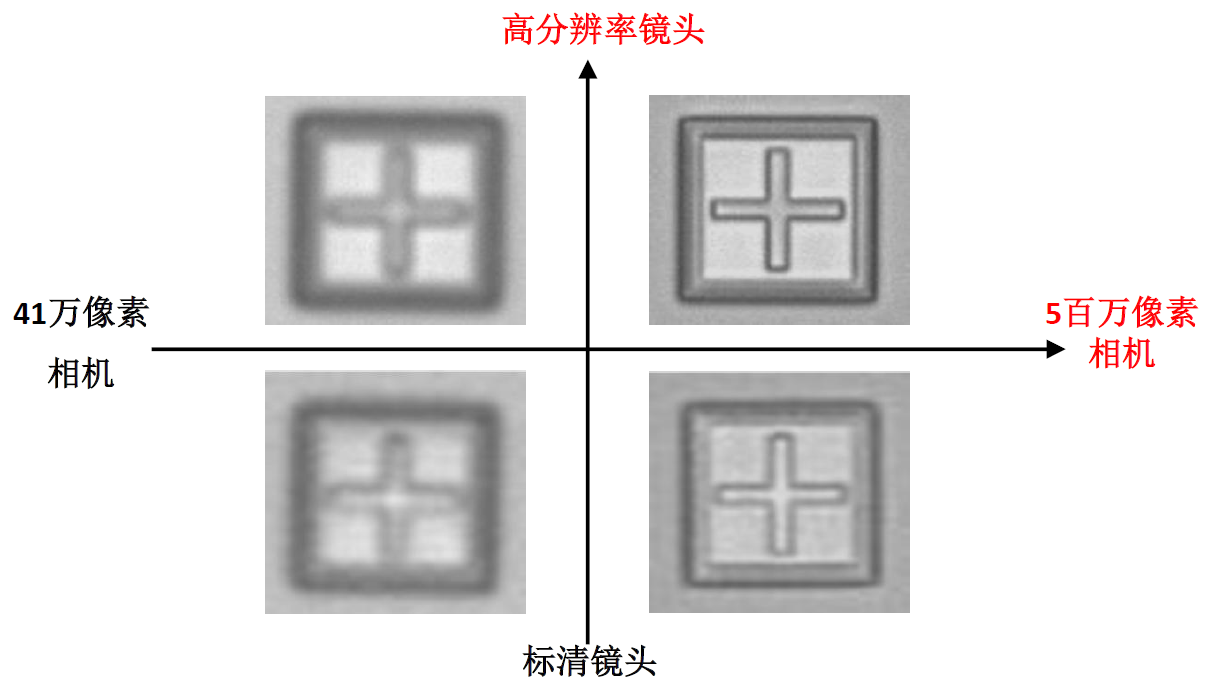
“木桶效应”:视觉系统的性能,取决于当中最差的元件!
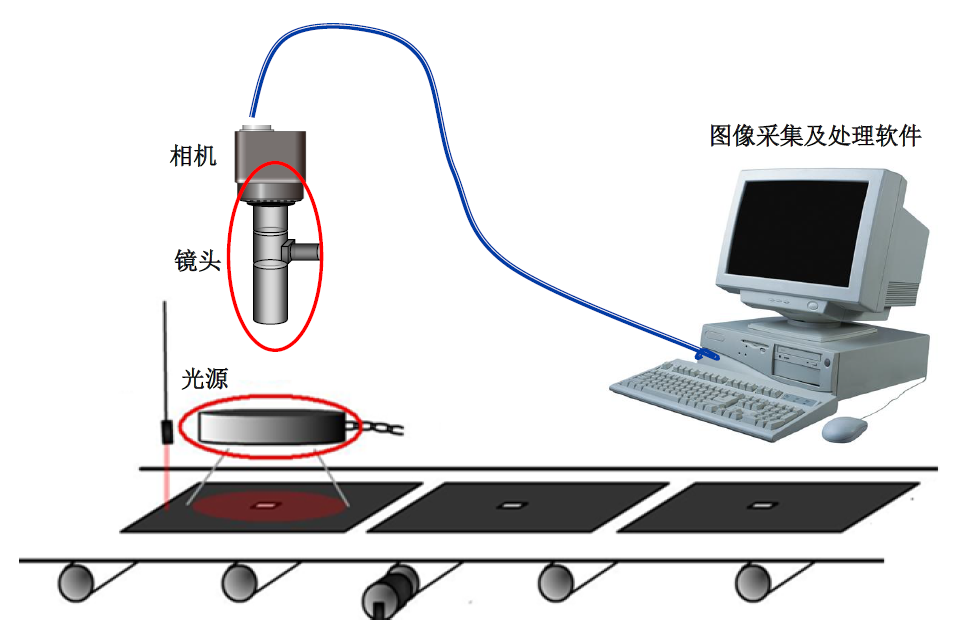
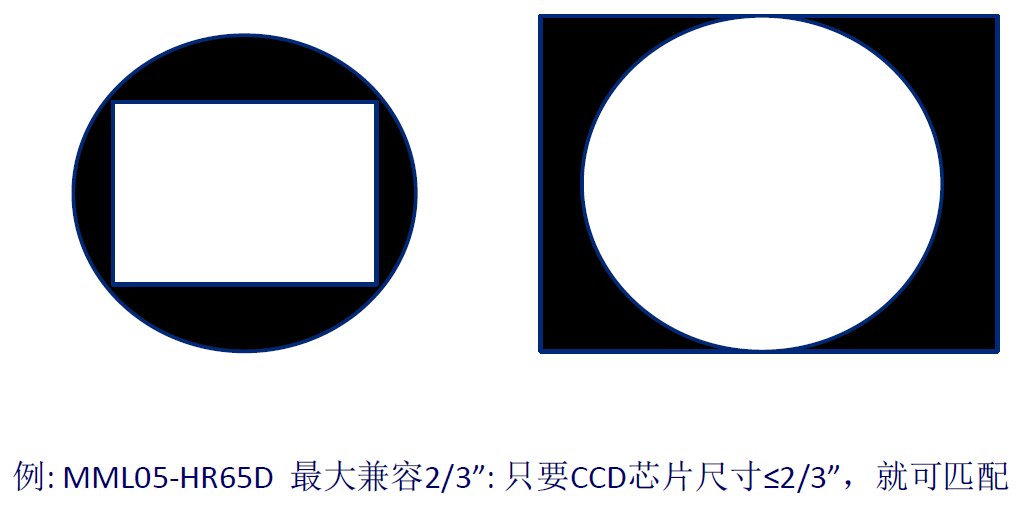
镜头与相机的匹配
镜头常用名词
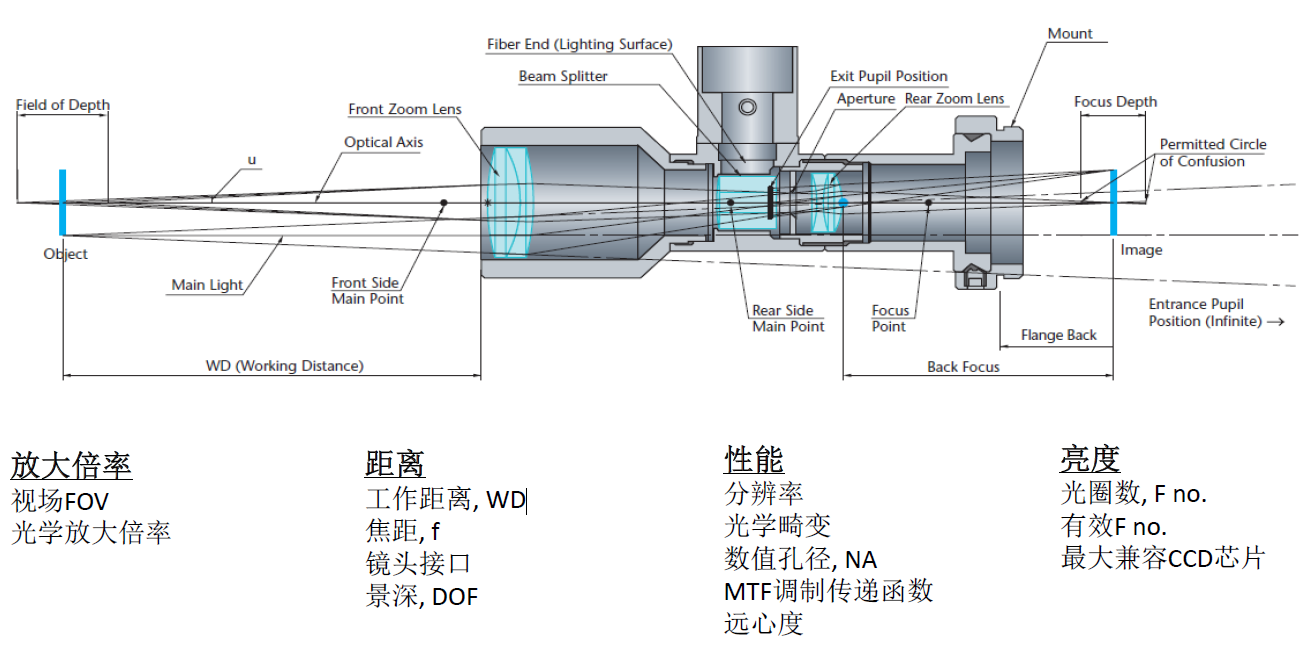
Field of Depth:景深(Depth of Field)
Front Side Main Point:前端主点
Rear Side Main Point:后端主点
Main Light:主光线
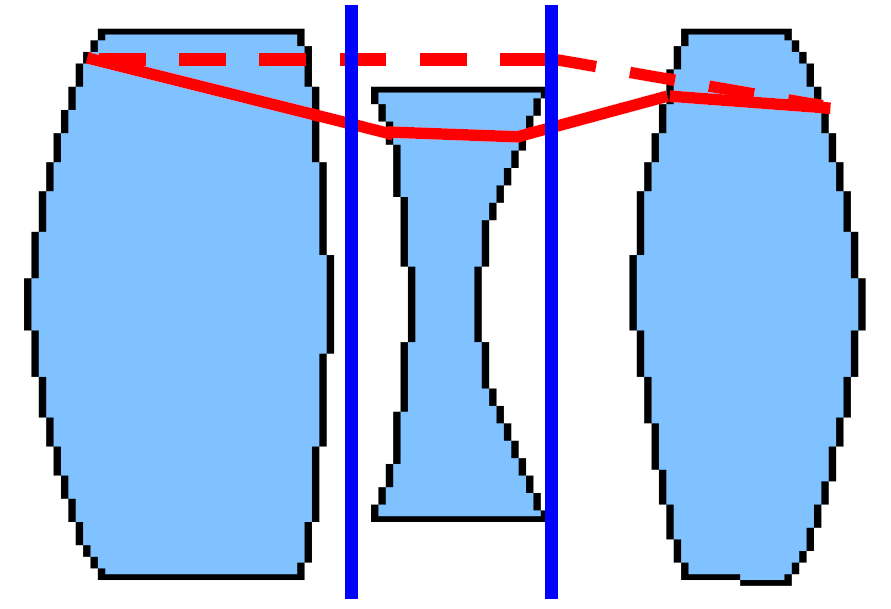
Front Zoom Lens:前变焦镜头
Rear Zoom Lens:后变焦镜头
Fiber End (Lighting Surface):光纤尾部(照明面)
Beam Splitter:分束器
Exit Pupil Position:出射光瞳位置
Aperture:孔径
Focus Point:焦点
Back Focus:后焦距
Flange Back:法兰距
Entrance Pupil Position (infinite):入射光瞳位置
Permitted Circle of Confusion:容许混淆圈()
Focus Depth: 焦深
Mount:挂载
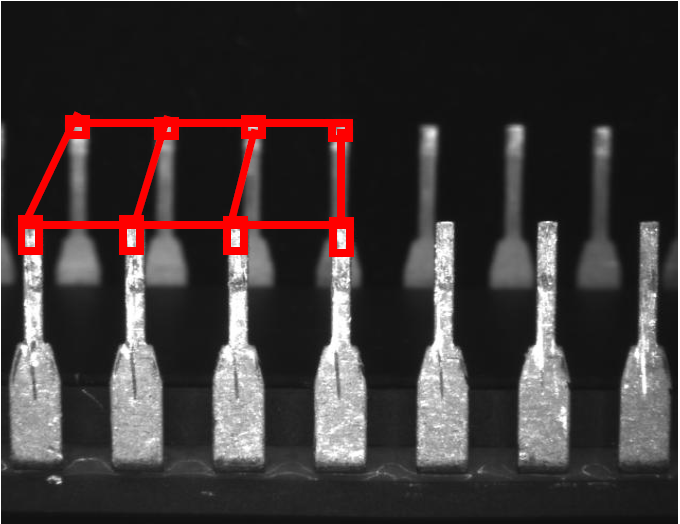
- 测量精度——远心度
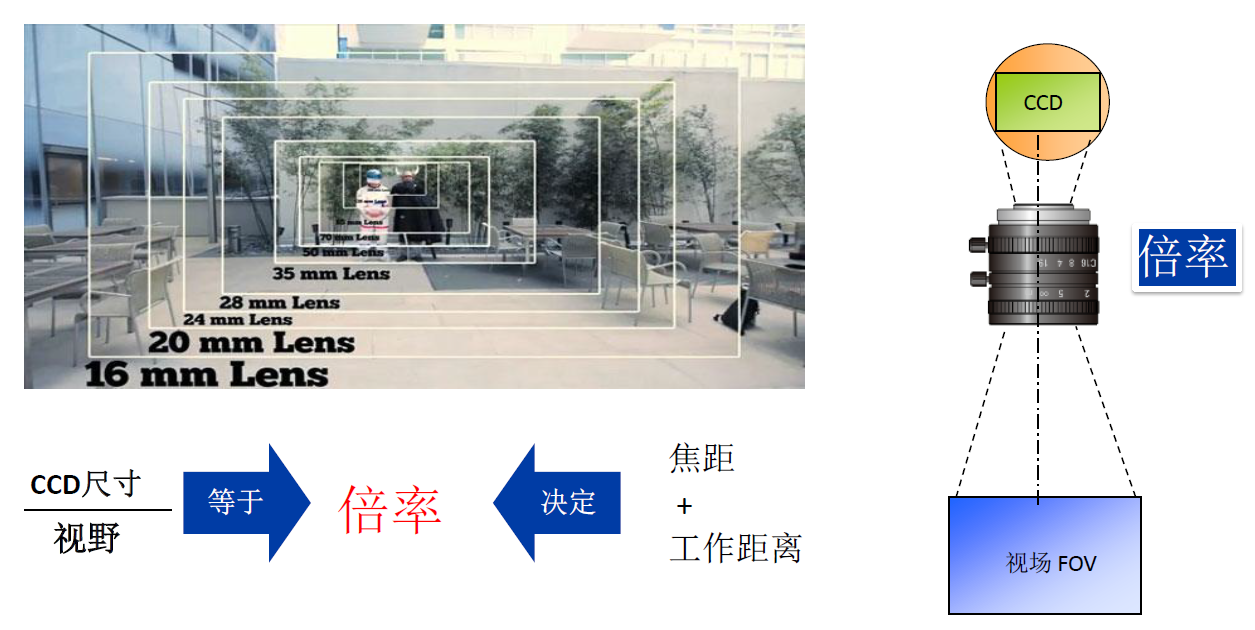
- 倍率
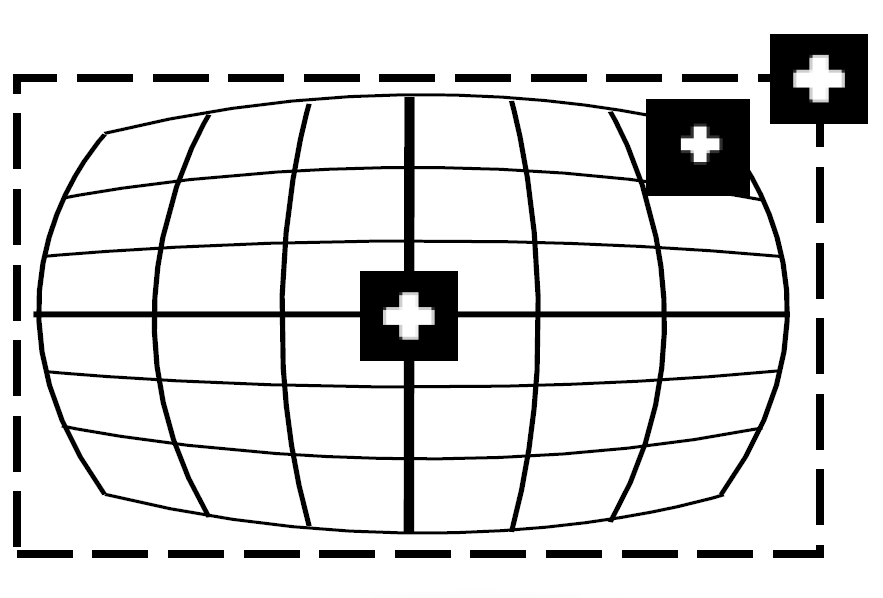
- 畸变
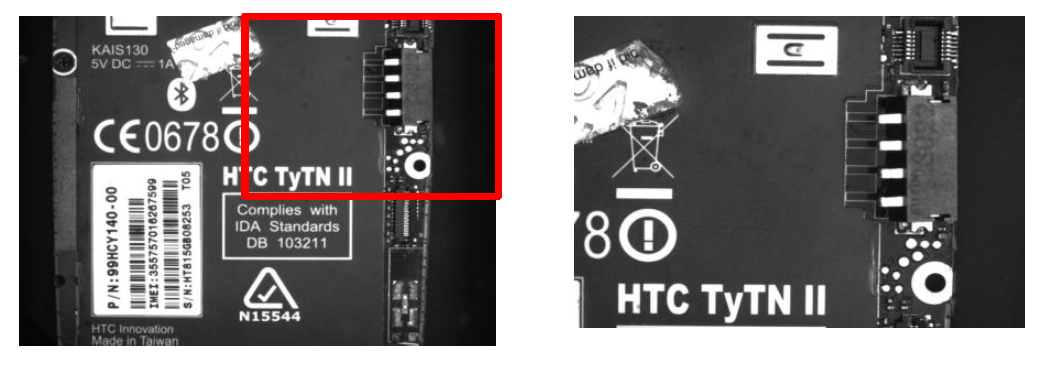
- 清晰程度——分辨率/MTF

- 高低差——景深

- 通光量——光圈F#

- 均匀度——相对照度

- 视场——焦距
视场(FOV)
视场(FOV):视觉中需要观测的对象物范围大小
倍率
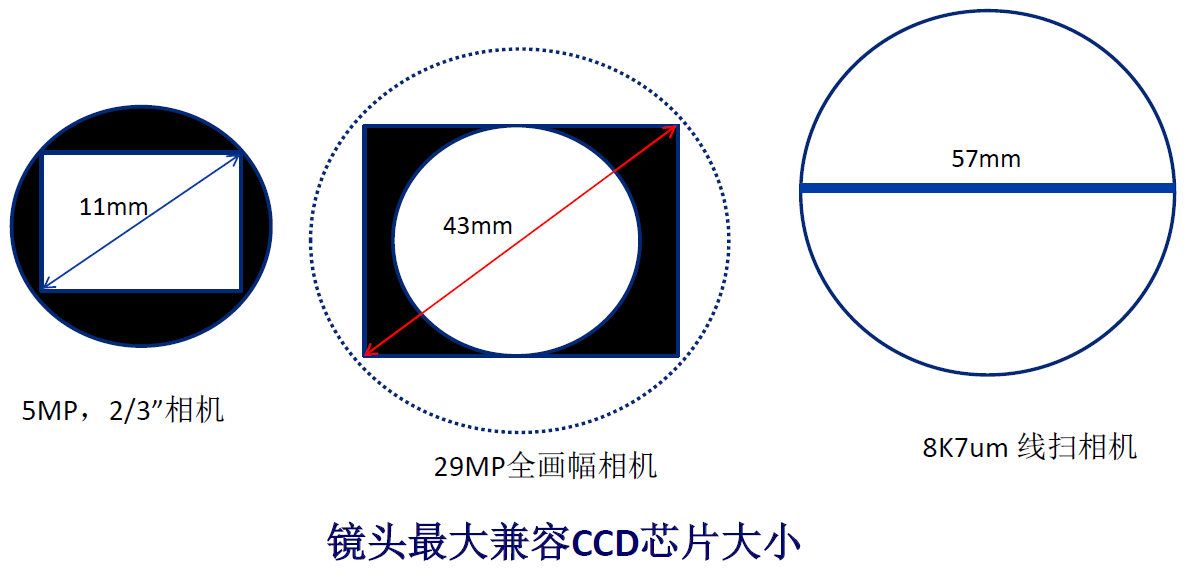
最大兼容CCD芯片大小
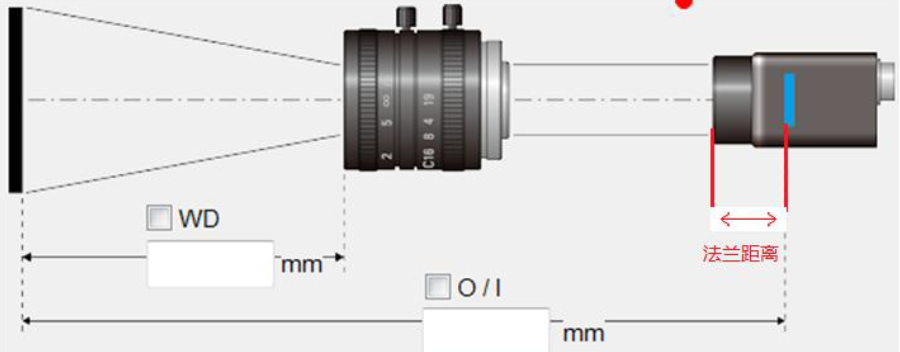
工作距离(WD)
工作距离(WD):指镜头前机械端面到被测物的距离。
物像距离(O/I):被测物到相机芯片的距离。
O/I=WD+镜头长度+相机法兰距
实际应用中,在进行机械设计时应先考虑镜头工作距离,以降低成本
镜头接口

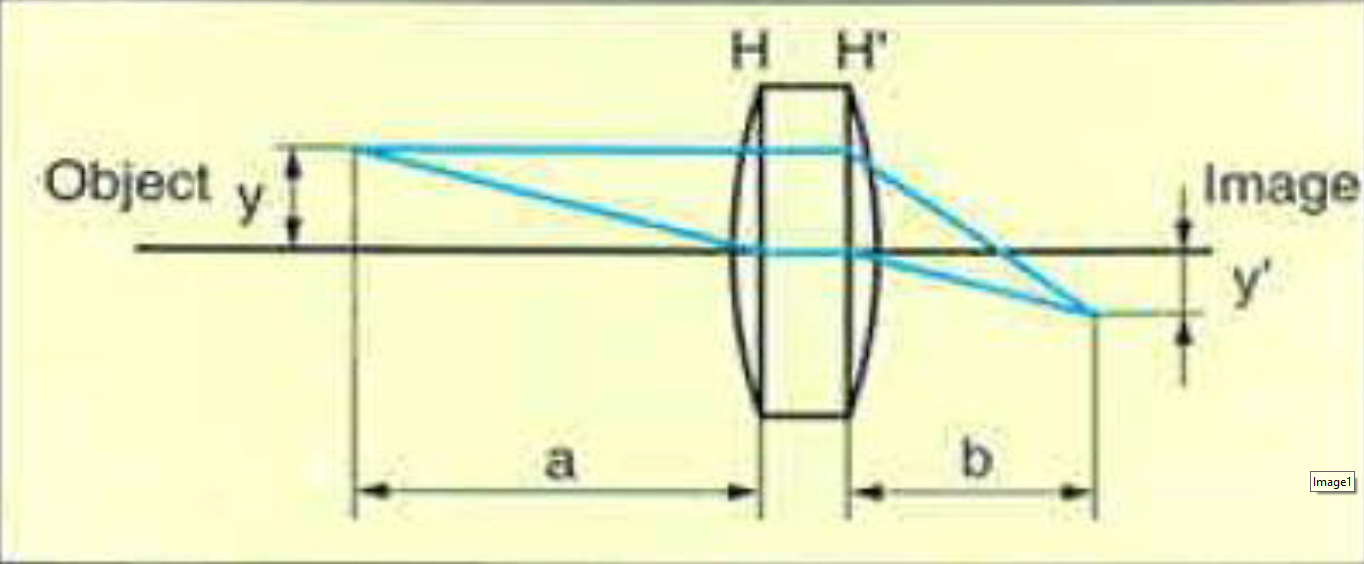
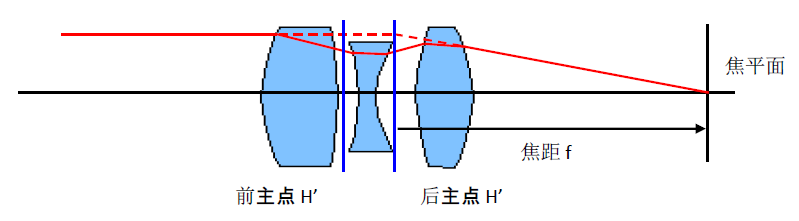
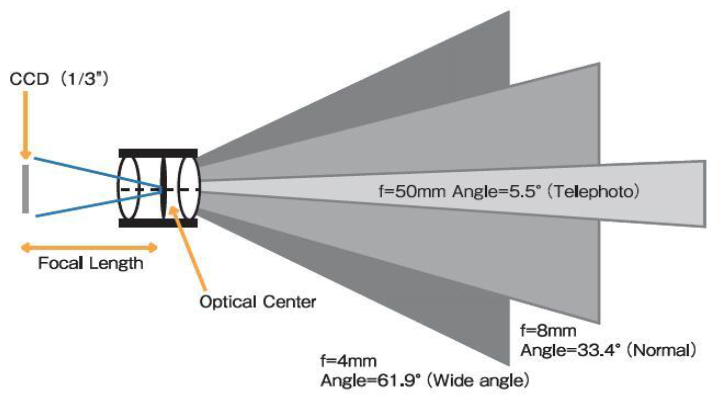
焦距
焦距:光学系统的主点到焦点的距离。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









