



 本文深入探讨了使用MATLAB和Robotics Toolbox进行机器人运动学的研究,包括机械臂的描述、正运动学、逆运动学的计算以及轨迹规划。通过实例展示了两连杆和六轴(如Puma560)机器人的运动学分析,重点讲解了如何利用fkine和ikine函数解决正向和逆向运动问题。
本文深入探讨了使用MATLAB和Robotics Toolbox进行机器人运动学的研究,包括机械臂的描述、正运动学、逆运动学的计算以及轨迹规划。通过实例展示了两连杆和六轴(如Puma560)机器人的运动学分析,重点讲解了如何利用fkine和ikine函数解决正向和逆向运动问题。
- 参考书目:《机器人学、机器视觉与控制——MATLAB算法基础》,Peter Corke
- 准备工具:MATLAB,Robotics Toolbox[download],安装方法参考[blog]
根据毕业设计的要求,本文主要讨论机械臂动力学,视觉与控制
一、机械臂运动学
运动学是力学的一个分支,它在不考虑质量和作用力的前提下研究一个刚体,或者由多个刚体组成系统的运动。
1.描述一台机械臂
一个串联机械臂的整个链路是由一组被称为连杆的刚体组成的,这些连杆由关节(运动副)连接起来。每个关节有一个平移(滑动或移动副)或者转动(转动副)的自由度。关节的运动改变了其邻接连杆的相对角度和位置。
- 使用工具箱中的 Link 对象来描述一个机器人连杆:

>> L = Link([0, 0.1, 0.2, pi/2, 0])
L =
Revolute(std): theta=q, d=0.1, a=0.2, alpha=1.5708, offset=0
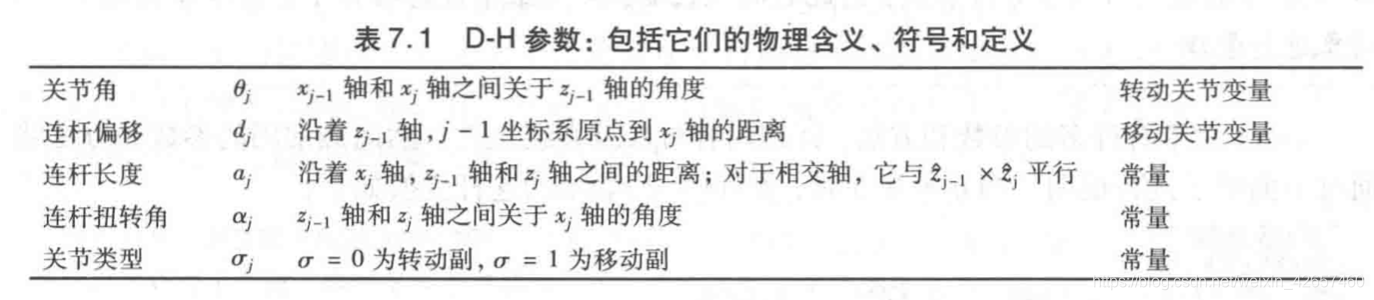
输入向量的元素按顺序为:关节角,连杆偏移,连杆长度,连杆扭转角;第五个元素未指定则默认为转动关节。
- 两连杆机器人
D-H 参数如下所示,用这些参数创建一个 Link 对象的向量 L:

>> L(1) = Link([0 0 1 0]);
>> L(2) = Link([0 0 1 0]);
>> L
L =
Revolute(std): theta=q1 d=0 a=1 alpha=0 offset=0
Revolute(std): theta=q2 d=0 a=1 alpha=0 offset=0
这个向量将被传递给构造函数 SerialLink:
>> two_link = SerialLink(L, 'name', 'two link')
two_link =
two link:: 2 axis, RR, stdDH, slowRNE
+---+-----------+-----------+-----------+-----------+-----------+
| j | theta | d | a | alpha | offset |
+---+-----------+-----------+-----------+-----------+-----------+
| 1| q1| 0| 1| 0| 0|
| 2| q2| 0| 1| 0| 0|
+---+-----------+-----------+-----------+-----------+-----------+
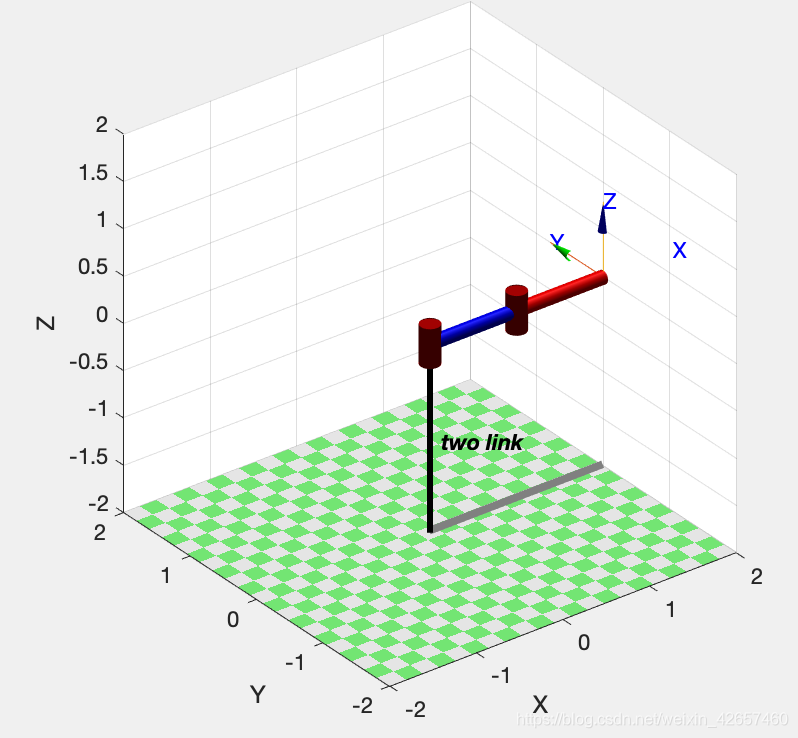
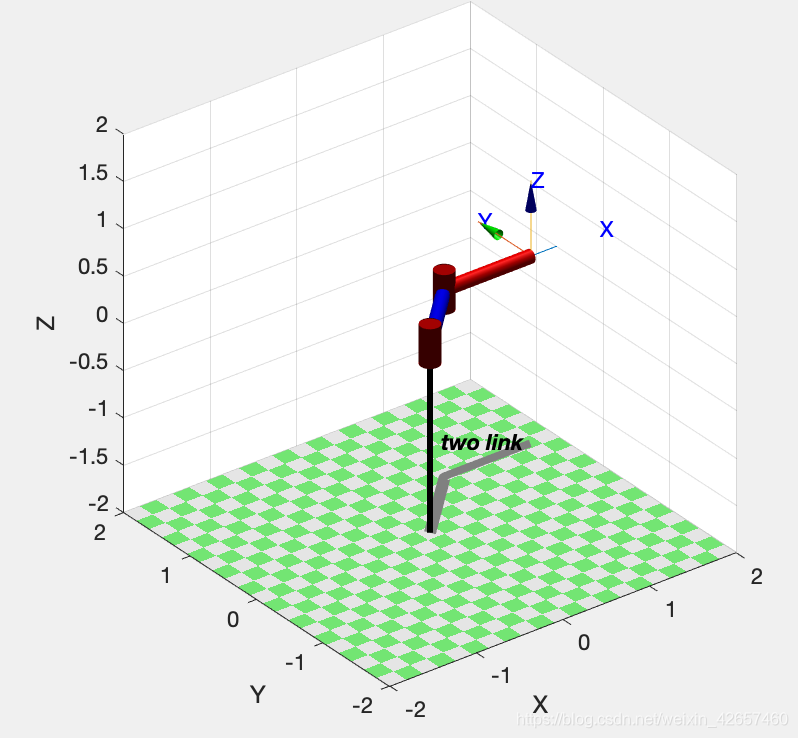
用以下指令,可以画出机器人的图形:
>> two_link.plot([0 0])
>> two_link.plot([pi/4 -pi/4])
- 六轴机器人
以 Puma 560 机器人为例,使用如下指令定义一个 Puma 560 机器人的实例(工具箱自带模板指令来定义很多常见的工业机器人),它将在工作区中创建一个名为 p560 的 SerialLink 对象:
>> mdl_puma560
>> p560
p560 =
Puma 560 [Unimation]:: 6 axis, RRRRRR, stdDH, slowRNE
- viscous friction; params of 8/95;
+---+-----------+-----------+-----------+-----------+-----------+
| j | theta | d | a | alpha | offset |
+---+-----------+-----------+-----------+-----------+-----------+
| 1| q1| 0| 0| 1.5708| 0|
| 2| q2| 0| 0.4318| 0| 0|
| 3| q3| 0.15005| 0.0203| -1.5708| 0|
| 4| q4| 0.4318| 0| 1.5708| 0|
| 5| q5| 0| 0| -1.5708| 0|
| 6| q6| 0| 0| 0| 0|
+---+-----------+-----------+-----------+-----------+-----------+
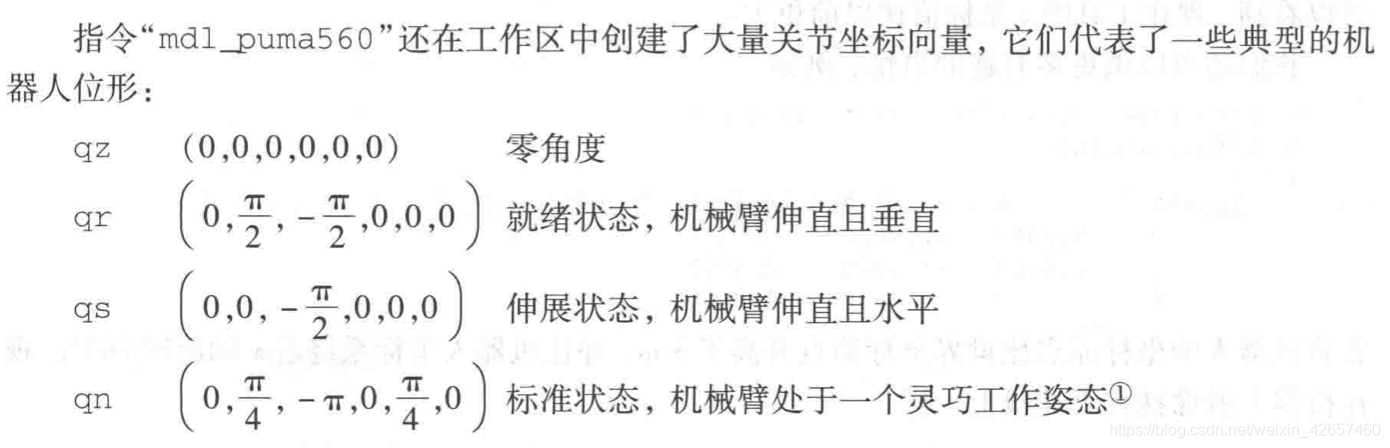
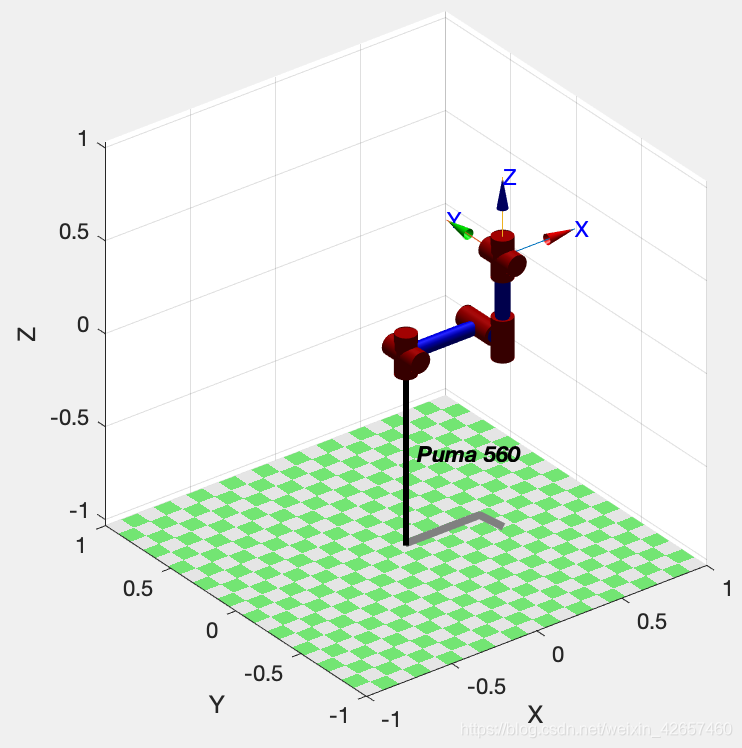
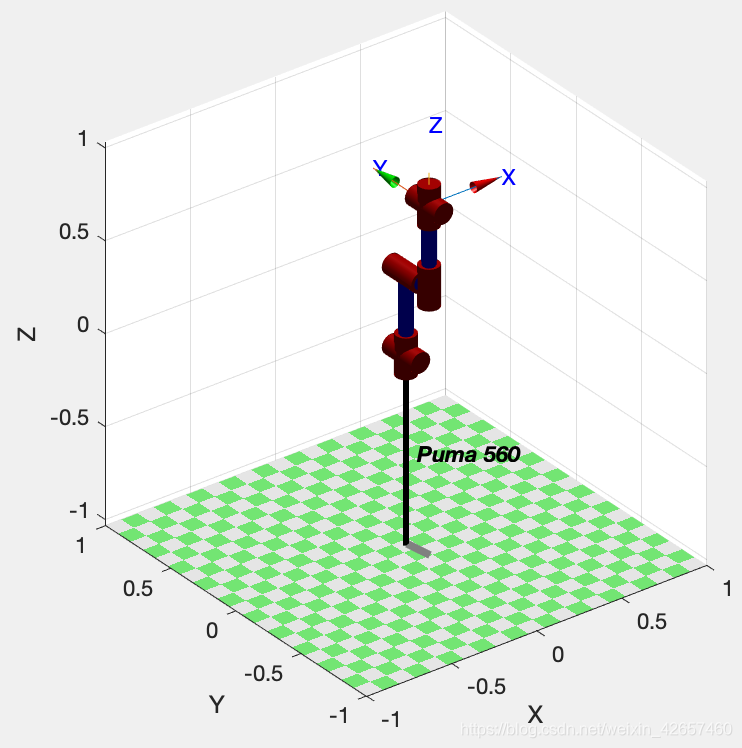
>> p560.plot(qz)
>> p560.plot(qr)
>> p560.plot(qs)
>> p560.plot(qn)
2.正运动学

- 两连杆机器人 - planar2:
>> mdl_planar2 % 直接构造2连杆平面机器人,并创建名为 two_link 的 SerialLink 对象
>> two_link.fkine([0 0]) % q1 = 0, q2 = 0 时的变换矩阵
ans =
1 0 0 2
0 1 0 0
0 0 1 0
0 0 0 1
>> two_link.fkine([pi/4 -pi/4]) % q1 = pi/4, q2 = -pi/4
ans =
1 0 0 1.707
0 1 0 0.7071
0 0 1 0
0 0 0 1
- 六轴机器人 - Puma 560:
>> mdl_puma560 % 直接构造 Puma 560 机器人,并创建名为 P560 的 SerialLink 对象
>> p560.fkine(qz) % 零角度时的变换矩阵
ans =
1 0 0 0.4521
0 1 0 -0.15
0 0 1 0.4318
0 0 0 1
>> p560.fkine(qn) % 标准状态时的变换矩阵
ans =
0 0 1 0.5963
0 1 0 -0.1501
-1 0 0 -0.01435
0 0 0 1
3.逆运动学
给定期望的末端执行器位姿,求取所需的关节坐标。一般而言,逆运动学的解不是唯一的,而且对于某些类型的机械臂甚至没有封闭形式的解存在,只能求出一个数值解
- 封闭形式解 - ikine6s
对于六轴机器人,其逆运动学具有封闭形式解的一个必要条件是:三个腕关节的轴相交于一个点。这意味着腕关节的运动只改变末端执行器的姿态,而不改变其位置
>> mdl_puma560
>> qn % 机器人标准状态的关节坐标
qn =
0 0.7854 3.1416 0 0.7854 0
>> T = p560.fkine(qn) % 标准状态对应的末端执行器位姿
T =
0 0 1 0.5963
0 1 0 -0.1501
-1 0 0 -0.01435
0 0 0 1
>> qi = p560.ikine6s(T) % ikine6s 方法计算其逆运动学的封闭解,要实现位姿 T,所需的关节坐标为 qi
qi =
2.6486 -3.9270 0.0940 2.5326 0.9743 0.3734
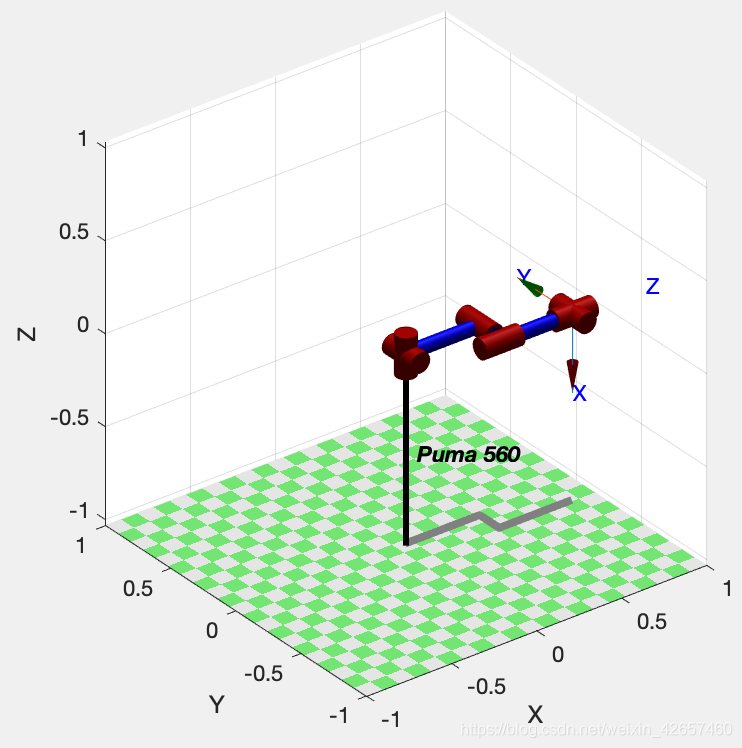
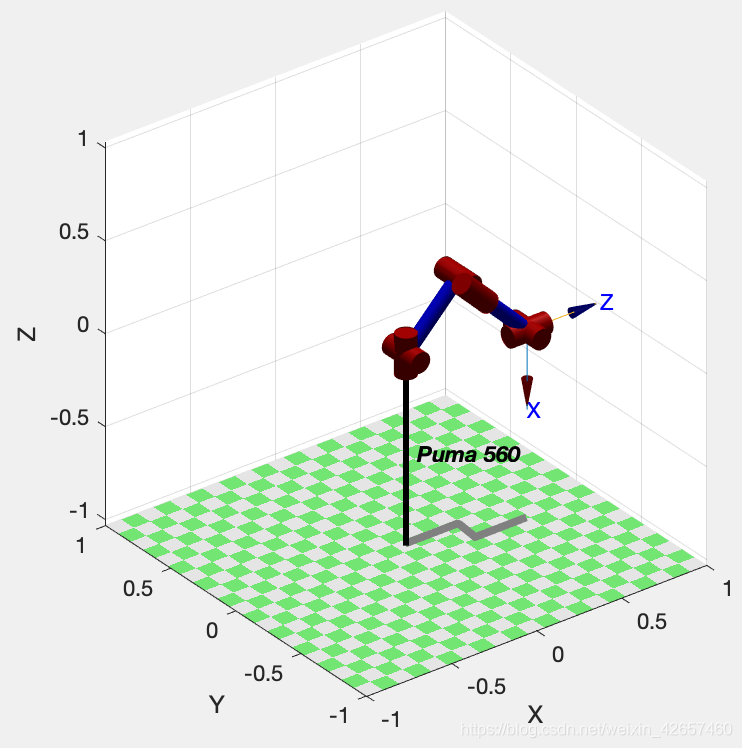
由 qn 和 qi 的坐标比较可知,两组不同的关节坐标值得到了相同的末端执行器位姿,这两组坐标值对应的机器人位形如图所示:
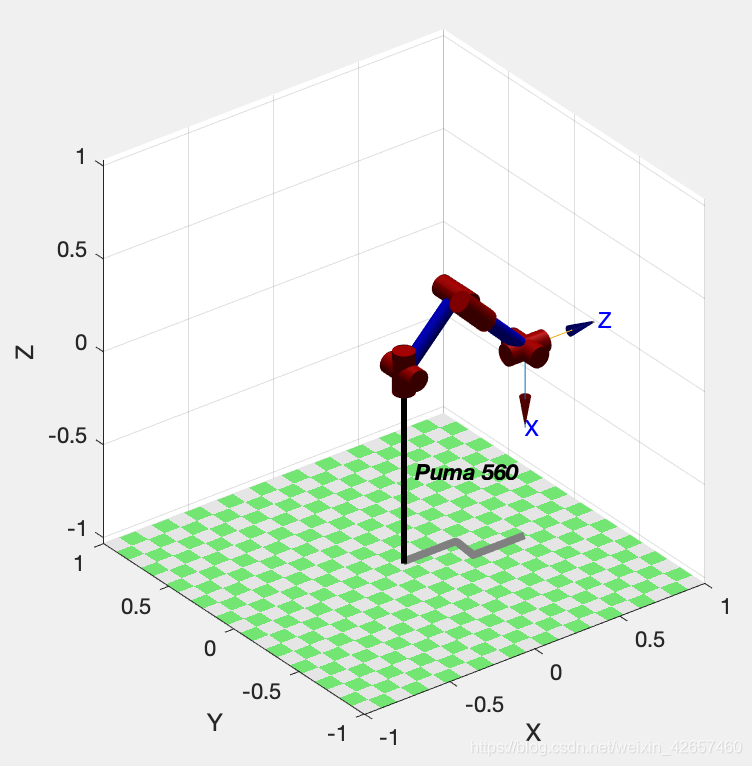
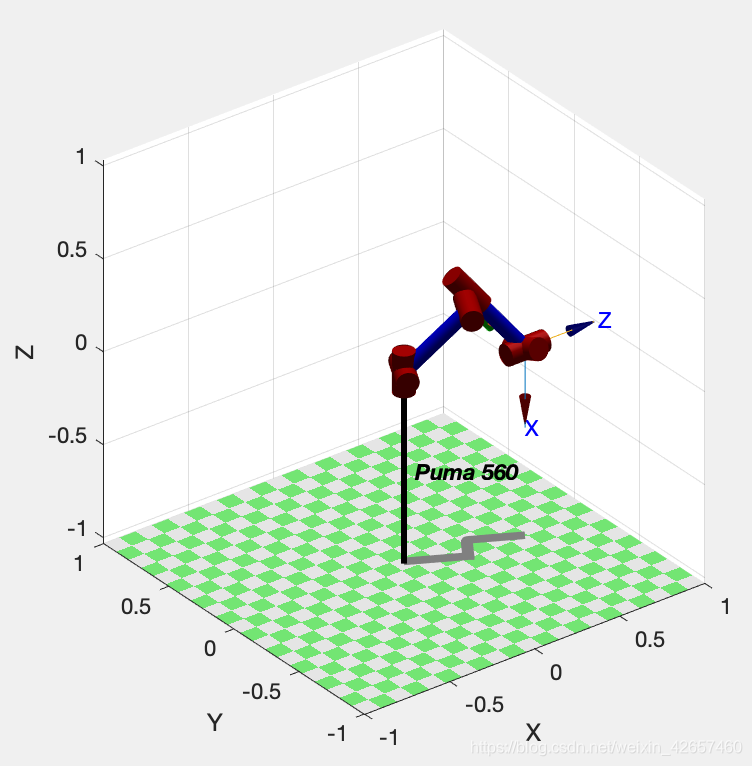
分别为左手运动学位形和右手运动学位形,一般来说,有8组不同的关节坐标值可以得到相同的末端执行器位姿
- 数值解 - ikine
对于不具有6个关节和球形腕关节的机器人,需要使用一种迭代数值解,使用 ikine 方法来计算一般逆运动学解:
>> mdl_puma560
>> qn % 机器人标准状态的关节坐标
qn =
0 0.7854 3.1416 0 0.7854 0
>> T = p560.fkine(qn) % 标准状态对应的末端执行器位姿
T =
0 0 1 0.5963
0 1 0 -0.1501
-1 0 0 -0.01435
0 0 0 1
>> qi = p560.ikine(T) % ikine 方法计算其逆运动学的封闭解,要实现位姿 T,所需的关节坐标为 qi
qi =
-0.0000 -0.8335 0.0940 0.0000 -0.8312 -0.0000

















 16
16

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









