




文章目录
介绍
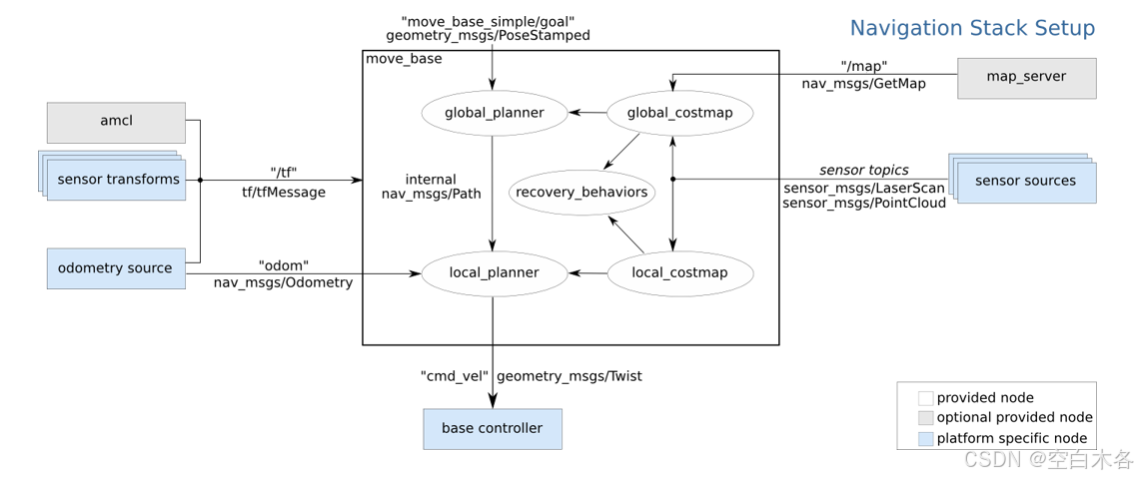
ROS导航功能包通过处理里程计数据、传感器数据和环境地图数据,根据发布的目标点位姿为机器人运动生成一条安全的路径。
输入数据
- /tf:提要提供的tf包括map_frame、odom_frame、base_frame以及机器人各关节之间的完成的一棵tf树;
- /odom:里程计信息;
- /scan或/pointcloud:传感器的输入信息,最常用的是激光雷达(sensor_msgs/LaserScan类型),也有用点云数据(sensor_msgs/PointCloud)的;
- /map:地图,可以由SLAM程序来提供,也可以由map_server来指定已知地图。
以上四个Topic是必须持续提供给导航系统的,下面一个是可随时发布的topic:
- move_base_simple/goal:目标点位置,一般通过Rviz中"2D Nav Goal"进行发布。
输出:
- /cmd_vel:geometry_msgs/Twist类型,为每一时刻规划的速度信息。
move_base包
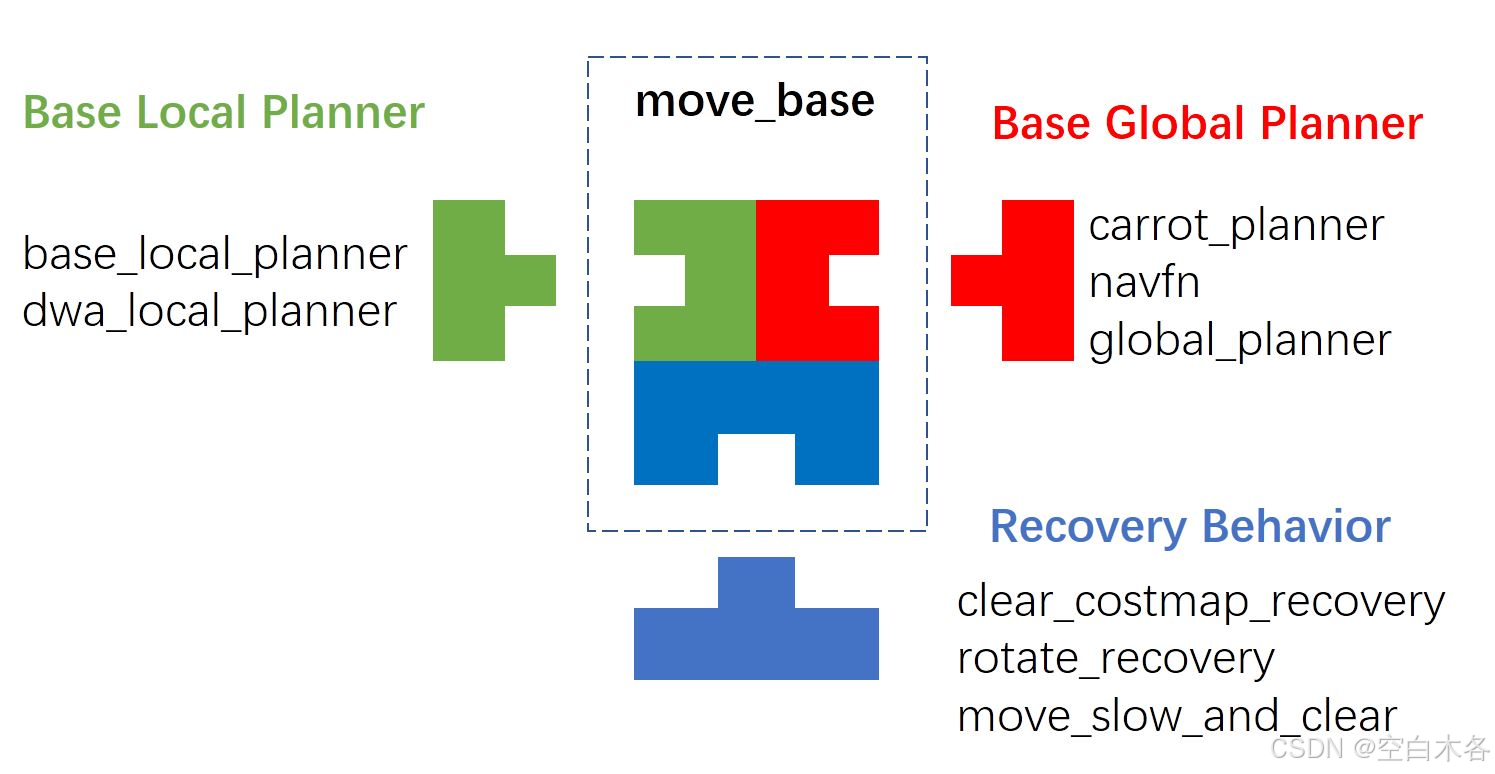
move_base包括三种插件:base_local_planner、base_global_planner和recovery_behavior,这三种插件都得指定,否则系统会指定默认值。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 9564
9564




 到【灌水乐园】发言
到【灌水乐园】发言









