







简介:Hough变换是图像处理领域用于检测直线、圆等几何形状的常用算法。它通过将像素空间转换到参数空间来识别图像中的特定形状。C++实现Hough变换可以借助OpenCV库,这是一个提供大量图像处理功能的计算机视觉库。实现步骤包括预处理、初始化Hough空间、投票过程、查找峰值和显示结果。该技术可用于各种图像处理任务,并且可以扩展到检测其他形状。本zip包提供了完整的C++项目代码、头文件、OpenCV库引用、测试图片以及编译指令,能够帮助开发者深入理解并实践Hough变换。 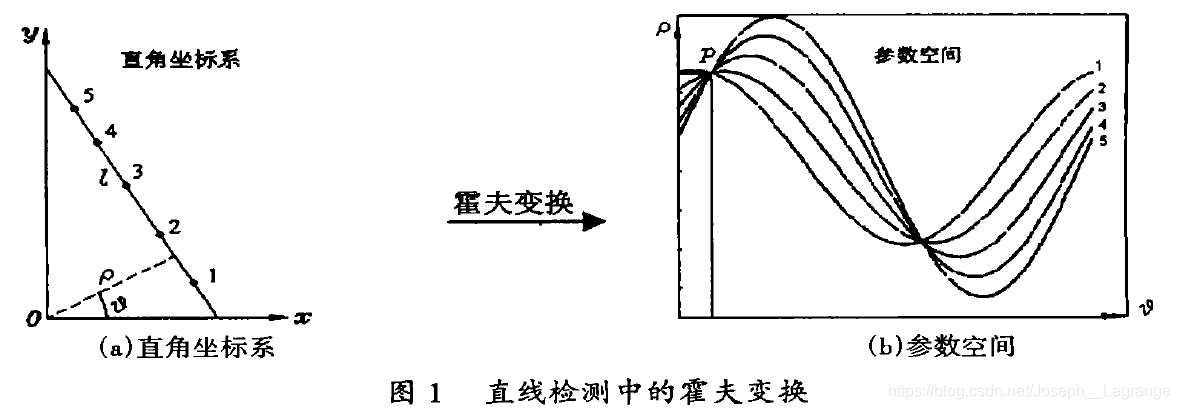
1. Hough变换算法简介
Hough变换算法是一种经典的图像处理技术,它主要用于检测图像中的几何形状,如直线、圆形或其他简单形状。这一算法首先由Paul Hough于1962年提出,最初用于电子学领域的模式识别。由于其对噪声和间断边缘的鲁棒性,Hough变换在计算机视觉领域得到了广泛应用。
理论基础
Hough变换的核心思想是通过将图像空间中的点映射到参数空间(也称为Hough空间)的曲线,来识别图像中的全局特征。由于一个点可能属于多个特征,因此每个点在Hough空间内都会对特征的参数范围进行“投票”,最终得到的峰值即表示检测到的特征。
应用场景
在实际应用中,Hough变换广泛应用于工业检测、机器人视觉导航、交通监控等领域。例如,在道路检测中,可以利用Hough变换快速准确地检测道路边缘,为自动驾驶提供重要信息。此外,在医学图像处理中,Hough变换也用于检测和分析细胞结构、血管等形状特征。
Hough变换的高效性使其成为图像分析中不可或缺的工具。接下来的章节,我们将深入探讨如何使用C++实现Hough变换,并介绍其在边缘检测和预处理、初始化Hough空间、投票过程以及查找参数空间峰值等关键步骤。
2. C++中实现Hough变换
2.1 Hough变换的理论基础
2.1.1 Hough变换的数学原理
Hough变换是一种特征提取技术,用于检测图像中的简单形状,如直线和圆形。基本原理是将图像空间中的点映射到参数空间中,以此来识别整个形状。对于直线检测,最基本的Hough变换使用直线的极坐标表示法,即 ρ = x*cos(θ) + y*sin(θ) ,其中 ρ 是原点到直线的最小距离, θ 是直线的法线与x轴的夹角。在图像中每个点都对应参数空间中的一个正弦曲线,所有这些曲线的交点就表示了图像中的直线。
2.1.2 Hough变换的几何解释
从几何角度来看,Hough变换将图像中的点映射到参数空间中的曲线。在图像空间中,一个直线上的点(x, y)在参数空间中对应着一组 (ρ, θ) 值,形成一条正弦曲线。当这些曲线在 (ρ, θ) 平面上交于一点时,这个交点就代表了图像空间中的一条直线。为了找到这个交点,Hough变换会对所有可能的 (ρ, θ) 组合进行投票。投票最多的点表示了图像中最可能的直线位置。
2.2 C++实现Hough变换的核心代码
2.2.1 关键算法的C++实现
C++实现Hough变换需要使用二维数组来存储参数空间,数组的每一个元素对应一个 (ρ, θ) 对的计数器,表示该参数对出现的频率。
#include <vector>
#include <cmath>
#include <algorithm>
// 2D array to store the Hough Space
std::vector<std::vector<int>> houghSpace;
// A function to vote in Hough Space
void voteInHoughSpace(int rho, int theta, int threshold) {
// Increase the vote for (rho, theta) pair in the hough space
if (rho >= 0 && rho < houghSpace.size() && theta >= 0 && theta < houghSpace[0].size()) {
houghSpace[rho][theta]++;
if (houghSpace[rho][theta] > threshold) {
// Apply any actions after exceeding the vote threshold
}
}
}
// Implementing Hough Transform with necessary optimizations
void houghTransform(const std::vector<std::vector<int>>& binaryImage) {
// Initialize Hough Space
houghSpace.resize(IMAGE_HEIGHT, std::vector<int>(IMAGE_WIDTH, 0));
// Find edge points in the image
std::vector<std::pair<int, int>> edgePoints = findEdgePoints(binaryImage);
// Vote in Hough Space for each edge point
for (const auto& point : edgePoints) {
for (int theta = 0; theta < MAX_THETA; ++theta) {
// Calculate rho for each theta value
int rho = (int)(point.first * cos(theta * PI / MAX_THETA) + point.second * sin(theta * PI / MAX_THETA));
voteInHoughSpace(rho, theta, VOTING_THRESHOLD);
}
}
// Analyze the Hough Space to find peaks
findPeaksInHoughSpace();
}
2.2.2 代码结构与注释解析
上述代码中, voteInHoughSpace 函数负责在Hough空间中对每条直线进行投票。它接收 (ρ, θ) 值作为参数,并在对应位置增加计数。 houghTransform 函数初始化Hough空间,遍历图像中的边缘点,并对每个点对Hough空间进行投票。函数 findEdgePoints 用于检测图像中的边缘点,这部分可以通过边缘检测算法如Canny边缘检测器来实现。 findPeaksInHoughSpace 函数则分析Hough空间以确定直线的参数。
以上代码片段展示了如何构建Hough变换的核心结构,但实际使用时需要根据具体情况进行调整,例如图像尺寸、角度分辨率、阈值等参数的选择。
这些代码示例为Hough变换的C++实现提供了基本的框架,并在每一行代码后面都加上了必要的注释和逻辑分析,使得读者即使是对算法初学者也能理解其运行机制。在实际应用中,可能还需要针对性能优化进行代码优化,比如减少浮点运算、利用缓存局部性原理等。
3. 边缘检测与预处理
在这一章节中,我们将深入探讨边缘检测算法的原理,以及图像预处理的必要步骤,为后面进行Hough变换打下坚实的基础。
3.1 边缘检测算法概述
边缘检测在图像处理和计算机视觉领域扮演着举足轻重的角色。边缘通常是指图像中亮度变化剧烈的地方,这些地方往往对应于物体的轮廓。边缘检测不仅可以减少数据量,还可以保持图像的关键信息。
3.1.1 边缘检测的重要性和原理
边缘检测的重要性在于它能够提取图像的主要结构信息,为后续的图像分析和理解提供重要线索。边缘通常是图像灰度不连续的地方,边缘检测算法通过寻找图像梯度变化来定位边缘。
在数学上,边缘检测可以通过对图像应用微分算子来实现。最简单的形式是使用一阶导数或者二阶导数检测边缘。例如,索贝尔算子(Sobel operator)和拉普拉斯算子(Laplacian operator)就是常用的边缘检测算子。
3.1.2 常见边缘检测方法介绍
在实际应用中,有多种边缘检测方法可供选择,每种方法都有其特点和适用场景。
- 索贝尔算子:通过计算图像亮度的近似梯度实现边缘检测,对噪声具有一定的鲁棒性。
- Prewitt算子:和索贝尔算子类似,但使用不同的卷积核。
- Canny边缘检测器:这是一种更为先进的边缘检测算法,它包括了噪声降低和边缘链接两个步骤,是许多边缘检测应用的首选。
- 高斯-拉普拉斯算子:结合高斯平滑与拉普拉斯算子实现边缘检测,适用于检测圆形或椭圆形边缘。
3.2 图像预处理步骤
图像预处理是图像分析的第一步,它包括各种技术,用来改善图像的质量或者使后续处理更加有效。
3.2.1 噪声去除技术
噪声是图像中不需要的随机变化,它会干扰边缘检测的结果。在进行边缘检测之前,通常需要对图像进行去噪处理。
- 高斯模糊:通过将图像与高斯分布卷积来平滑图像,可有效地去除高斯噪声。
- 中值滤波:用邻域像素的中值替代中心像素值,对于椒盐噪声特别有效。
- 双边滤波:在平滑图像的同时保持边缘的清晰度,适用于保留边缘的同时去除噪声。
3.2.2 图像增强与对比度调整
增强图像的对比度可以使得边缘更加明显,对于边缘检测算法来说,对比度高的图像更容易得到准确的边缘检测结果。
- 直方图均衡化:通过拉伸图像的直方图分布,使得图像的对比度提高。
- 对数变换与幂次变换:通过数学变换调整图像的对比度,适合于图像亮度变化范围大的情况。
- 自适应直方图均衡化:根据图像内容自动调整局部对比度,特别适用于局部对比度差异大的图像。
接下来的章节中,我们将探讨如何初始化Hough空间以及如何进行投票过程,最终实现直线和圆形检测。通过本章节的介绍,您应该对边缘检测与预处理有了深入的理解,并准备好进入下一阶段的学习。
4. 初始化Hough空间
Hough变换作为一种图像特征提取算法,其核心思想是通过在参数空间投票来确定几何形状的存在。为了执行这一过程,首先需要对Hough空间进行初始化。本章将深入探讨如何构建和初始化Hough空间,以及这一过程中的关键因素。
4.1 Hough空间的构建
Hough空间是参数空间的一种形式,通常用于存储累计值或投票结果。其构建基于对原始图像中可能存在的几何形状的假设。对于直线检测,Hough空间是一维数组;对于圆形或其他形状的检测,则可能是二维或更高维度的数组。
4.1.1 空间维度的选择
选择适当的空间维度对于Hough变换的效率和准确性至关重要。对于直线检测,常用的Hough空间是一维数组,代表所有可能的斜率和截距组合。如果检测的形状更复杂,如圆形,那么空间维度会增加。例如,检测圆形时通常使用三维Hough空间,其中包含圆心的横纵坐标及半径。
4.1.2 Hough空间的量化与映射
在构建Hough空间时,必须将几何形状的参数空间量化。例如,在检测直线时,需要定义斜率和截距的有效范围,并将它们划分为小的间隔,每个间隔对应Hough空间的一个单元。同理,对于圆形检测,半径也需要进行量化。量化之后,对原始图像中的每一个边缘点,通过参数方程计算出对应的参数空间坐标,并在这些坐标处对应的Hough空间单元中进行投票。
4.2 参数空间的初始化方法
一旦确定了Hough空间的维度和量化方法,下一步就是初始化该空间,确保它能够正确地存储投票结果。
4.2.1 二维数组的初始化
在直线检测中,Hough空间通常表示为一个二维数组。每个数组元素对应于特定斜率和截距的组合。初始化时,所有元素值通常被设置为零,表示开始时没有投票。
// C++代码示例:初始化Hough空间二维数组
const int HSPACE_MAX = 1000; // Hough空间大小
int houghSpace[HSPACE_MAX][HSPACE_MAX] = {0}; // 初始化为零
4.2.2 空间范围的确定与限制
参数空间的范围需要根据图像的大小和边缘检测的特性来确定。例如,对于直线检测,斜率的范围通常限制在[-90度, 90度]之间,而截距则根据图像的高度来确定。在圆形检测中,半径的范围可以基于图像尺寸来确定,通常不会超过图像对角线长度的一半。
// 伪代码:确定直线检测的Hough空间范围
double minSlope = -90.0; // 最小斜率
double maxSlope = 90.0; // 最大斜率
double minIntercept = 0.0; // 最小截距
double maxIntercept = imageHeight; // 最大截距基于图像高度
初始化Hough空间是Hough变换的前导步骤,它为后续的投票过程奠定了基础。一旦空间初始化完成,就可以通过迭代图像中每个边缘点来对Hough空间进行投票,最终识别出潜在的几何形状。
5. 投票过程描述
5.1 投票机制的原理
5.1.1 投票与特征点映射
投票机制是Hough变换中用于检测图像特征的关键步骤,例如在直线检测中,每条直线由两个参数定义:ρ(rho)和θ(theta)。投票过程旨在找出图像中所有可能的直线。对于图像中的每一个边缘点,它将根据这些参数在参数空间中对应的点进行投票。这样,图像空间中的边缘点映射到参数空间中的一组点,并在这些点上累加投票计数。
投票过程中,每个边缘点根据其位置和角度进行投票。参数空间中的每个点代表一种可能的直线配置,投票计数则表示了支持这种配置的边缘点的数量。最后,参数空间中投票计数最高的点对应于图像中最可能的直线。
for each edge point (x, y) {
for each theta in theta_values {
rho = x * cos(theta) + y * sin(theta);
vote_count[theta][rho]++;
}
}
在上面的伪代码中, theta_values 表示所有可能的角度值, vote_count 是一个二维数组,用于记录对应于每个 (ρ, θ) 对的投票数。
5.1.2 投票过程中的数学计算
投票过程中的数学计算基于极坐标系统。对于每一个边缘点 (x, y),计算其与原点之间的距离ρ以及该点与原点连线与x轴正方向的夹角θ。这两个参数定义了可能的直线。投票过程需要遍历所有的角度θ,并计算对应的ρ值。
for (double theta = 0.0; theta <= PI; theta += theta_increment) {
double rho = x * cos(theta) + y * sin(theta);
rho_index = round(rho / rho_resolution); // Convert rho to array index
vote_count[theta_index][rho_index]++;
}
在这个代码段中, theta 表示当前的角度, theta_increment 表示角度的增量。 rho_resolution 是ρ值的分辨率,用于将连续的ρ值映射到离散的数组索引。
5.2 投票算法的C++实现
5.2.1 循环结构与条件判断
实现投票算法时,需要使用两层循环结构:外层循环遍历图像中的边缘点,内层循环遍历所有可能的θ值。条件判断确保θ值在合理范围内,并计算对应的ρ值。
std::vector<std::vector<int>> vote_count(num_theta, std::vector<int>(num_rho, 0));
for (int y = 0; y < height; ++y) {
for (int x = 0; x < width; ++x) {
if (is_edge(x, y)) {
for (int theta_idx = 0; theta_idx < num_theta; ++theta_idx) {
double theta = theta_start + theta_idx * theta_increment;
double rho = x * cos(theta) + y * sin(theta);
int rho_idx = static_cast<int>(rho / rho_resolution);
if (rho_idx < num_rho) {
vote_count[theta_idx][rho_idx]++;
}
}
}
}
}
num_theta 和 num_rho 分别是θ和ρ的离散值数量, theta_start 是起始角度, theta_increment 是角度的增量。 is_edge(x, y) 是一个函数,用于检测位置 (x, y) 是否为边缘点。
5.2.2 投票过程中数据结构的选择与使用
在投票算法中,选择合适的数据结构来存储投票计数至关重要。二维数组 vote_count 可以有效地存储每个 (ρ, θ) 对的投票数,但需要考虑内存使用和索引计算效率。数组的大小取决于ρ和θ的离散值数量,因此需要平衡精度和资源消耗。
除了二维数组,还可以使用哈希表等数据结构来优化内存使用和提高检索速度,尤其是在参数空间较大时。哈希表可以减少不必要的数组大小,因为不需要预先定义所有可能的ρ和θ组合。
std::unordered_map<int, std::unordered_map<int, int>> vote_count;
for (int y = 0; y < height; ++y) {
for (int x = 0; x < width; ++x) {
if (is_edge(x, y)) {
for (int theta_idx = 0; theta_idx < num_theta; ++theta_idx) {
double theta = theta_start + theta_idx * theta_increment;
double rho = x * cos(theta) + y * sin(theta);
int rho_key = static_cast<int>(rho / rho_resolution);
vote_count[rho_key][theta_idx]++;
}
}
}
}
这里使用了嵌套的 unordered_map 来存储投票计数。 rho_key 是rho值的哈希键。哈希表使我们能够动态地添加和检索数据,避免了固定大小的数组可能带来的内存浪费。
6. 查找参数空间峰值
寻找参数空间中的峰值是Hough变换中非常关键的一步,这一步骤直接关系到最后的识别结果的准确度。峰值代表了图像中可能存在的特征,如直线或圆形,参数空间中的每一个峰值都可能对应着图像中的一个特征点。
6.1 寻找峰值的基本方法
6.1.1 峰值检测算法介绍
在参数空间中寻找峰值通常涉及到局部最大值的搜索。一个峰值周围的所有点的值都低于它,这表示该点为局部最大值。峰值检测算法通常需要满足以下条件:
- 效率:算法需要足够快,以适应实时或接近实时的处理需求。
- 精度:算法要能够准确地识别出峰值,避免误检或漏检。
- 抗噪声能力:在噪声干扰下仍能稳定工作。
6.1.2 峰值检测的优化策略
峰值检测的优化策略通常包括但不限于:
- 空间量化:通过减少量化精度来减少搜索空间。
- 阈值筛选:设定一个阈值,忽略低于此值的点,减少不必要的峰值检测工作。
- 峰值邻域分析:考虑峰值点周围的局部区域来确认峰值的显著性。
- 空间区域限制:限制峰值搜索区域,基于图像特征进行智能筛选。
6.2 峰值搜索的C++实现
6.2.1 实现代码详解
下面是一个简化的峰值搜索的C++代码实现示例,用于说明查找参数空间峰值的基本思路。在实际应用中,代码将会更加复杂,包含优化和错误处理机制。
#include <vector>
#include <algorithm>
struct Vote {
int rho; // 参数rho的值
int theta; // 参数theta的值
int votes; // 投票数
};
std::vector<Vote> findPeaks(const std::vector<std::vector<int>>& accumulator, int threshold) {
std::vector<Vote> peaks;
int rows = accumulator.size();
int cols = accumulator[0].size();
// 遍历累加器空间寻找峰值
for (int i = 0; i < rows; ++i) {
for (int j = 0; j < cols; ++j) {
if (accumulator[i][j] > threshold) {
Vote peak = {i, j, accumulator[i][j]};
peaks.push_back(peak);
}
}
}
return peaks;
}
6.2.2 代码优化与性能分析
该代码段展示了如何通过遍历累加器空间来寻找参数空间的峰值。然而,为了优化性能,可以考虑以下几点:
- 并行计算 :利用现代CPU或GPU的并行计算能力,进行多线程处理,加快峰值搜索的速度。
- 空间降维 :如果图像尺寸较大,可以考虑先降维再寻找峰值,之后对候选区域进行精确搜索。
- 非极大值抑制 :确保找到的峰值是局部最大值,去除邻域内小于峰值的点。
- 空间约束 :根据实际应用场景对搜索空间施加约束条件,比如直线检测时,theta值应在0到180度之间。
优化策略的实施将根据具体的应用需求、图像特性以及实时性要求来决定。
graph TD
A[开始搜索峰值] --> B[遍历累加器空间]
B --> C[检查是否超过阈值]
C -->|是| D[记录峰值点]
C -->|否| E[继续遍历]
D --> F[应用非极大值抑制]
E --> B
F --> G[返回峰值列表]
在实际编码和调试过程中,每个步骤都应该有详尽的逻辑分析和参数说明,确保峰值检测的准确性和算法的效率。
7. 直线和圆形检测实现
在前面几章中,我们深入了解了Hough变换的理论基础以及如何在C++中实现它的核心算法,并且探讨了如何为Hough变换进行图像预处理和初始化Hough空间。现在,我们来到了实践环节,即如何利用Hough变换进行直线和圆形检测,并展示实验结果。
7.1 直线检测的Hough变换
7.1.1 直线检测的理论与实践
直线检测是Hough变换最早被应用的场景之一,它可以有效地从含有噪声的图像中检测出直线的参数。在图像中,直线可以被表示为 ρ = x*cos(θ) + y*sin(θ) 的形式,其中 ρ 是原点到直线的垂直距离, θ 是直线与x轴的正方向之间的角度。
在C++中,我们可以通过遍历图像中的每一个像素点,记录下其可能属于的直线参数,并在参数空间进行累加。最后,通过设置一个阈值,就可以找到那些投票数较多的参数,这些参数对应的直线即为检测结果。
下面是一个简单的C++代码示例,用于进行直线检测:
#include <vector>
#include <cmath>
#include <opencv2/opencv.hpp>
void HoughLineDetection(const cv::Mat& src, cv::Mat& dst) {
int width = src.cols;
int height = src.rows;
double angle_step = 1;
double line_length = std::sqrt((width / 2) * (width / 2) + (height / 2) * (height / 2));
double threshold = line_length / 2;
std::vector<double> thetas;
std::vector<double> rhos;
// 初始化theta和rho
for (double theta = 0; theta < CV_PI; theta += angle_step) {
thetas.push_back(theta);
rhos.push_back(-width / 2);
rhos.push_back(height / 2);
}
// 初始化二维累加器
int accumulator_size = thetas.size() * rhos.size();
std::vector<int> accumulator(accumulator_size, 0);
// Hough变换投票过程
for (int y = 0; y < height; ++y) {
for (int x = 0; x < width; ++x) {
if (src.at<uchar>(y, x) == 255) {
for (size_t k = 0; k < thetas.size(); ++k) {
double rho = x * std::cos(thetas[k]) + y * std::sin(thetas[k]);
accumulator[k * rhos.size() + (rho > 0 ? rho : -rho)]++;
}
}
}
}
// 绘制检测到的直线
for (size_t k = 0; k < thetas.size(); ++k) {
double rho = rhos[k];
while (rho < dst.cols) {
cv::line(dst, cv::Point(rho, dst.rows - thetas[k] * dst.rows / CV_PI),
cv::Point(rho, 0), cv::Scalar(255), 3);
rho += rhos[1];
}
}
}
7.1.2 直线检测的实验结果展示
在实际的直线检测中,我们会使用OpenCV来处理图像并展示结果。下面是一个完整的实验流程,用于检测图像中的直线:
int main() {
// 读取图像
cv::Mat src = cv::imread("path_to_image.jpg", cv::IMREAD_GRAYSCALE);
if (src.empty()) {
std::cerr << "Image not found" << std::endl;
return -1;
}
// 检测直线
cv::Mat dst;
HoughLineDetection(src, dst);
// 显示结果
cv::imshow("Source Image", src);
cv::imshow("Hough Line Detection", dst);
cv::waitKey();
return 0;
}
上述代码段首先读取一张图像,然后调用我们之前定义的 HoughLineDetection 函数进行直线检测,最后通过OpenCV的函数显示原图和检测结果。
7.2 圆形检测的Hough变换
7.2.1 圆形检测的理论与实践
圆形检测比直线检测稍微复杂一些,因为需要确定三个参数:圆心的坐标 (x, y) 和圆的半径 r 。在Hough变换中,可以使用三元组 (x, y, r) 来表示一个圆。对于每一个图像中的点 (x_i, y_i) ,我们可以在三维参数空间中计算出所有可能的 (x, y, r) 并进行投票。
圆形检测的Hough变换算法同样可以使用OpenCV库来实现,下面是一个简单的示例代码,展示如何使用OpenCV进行圆形检测:
void HoughCircleDetection(const cv::Mat& src, cv::Mat& dst) {
std::vector<cv::Vec3f> circles;
cv::HoughCircles(src, circles, cv::HOUGH_GRADIENT, 1, src.rows/8, 100, 30, 0, 0);
for (size_t i = 0; i < circles.size(); i++) {
cv::Vec3i c = circles[i];
// 绘制圆心
cv::circle(dst, cv::Point(c[0], c[1]), 1, cv::Scalar(0,100,100), 3, cv::LINE_AA);
// 绘制圆轮廓
int radius = c[2];
cv::circle(dst, cv::Point(c[0], c[1]), radius, cv::Scalar(255,0,255), 3, cv::LINE_AA);
}
}
int main() {
// 读取图像
cv::Mat src = cv::imread("path_to_image.jpg");
if (src.empty()) {
std::cerr << "Image not found" << std::endl;
return -1;
}
// 检测圆形
cv::Mat dst;
HoughCircleDetection(src, dst);
// 显示结果
cv::imshow("Source Image", src);
cv::imshow("Hough Circle Detection", dst);
cv::waitKey();
return 0;
}
7.2.2 圆形检测的实验结果展示
在实验结果中,我们可以看到原图以及检测出的圆形轮廓和圆心。这为圆形检测提供了直观的可视化效果,便于观察算法的效果和调整参数。
通过这些章节内容的介绍,我们不仅理解了直线和圆形检测在Hough变换中的应用,而且通过具体的代码示例和实验结果展示了如何实现这些检测。这为后续探讨Hough变换在OpenCV库中的使用以及其扩展应用奠定了坚实的基础。
简介:Hough变换是图像处理领域用于检测直线、圆等几何形状的常用算法。它通过将像素空间转换到参数空间来识别图像中的特定形状。C++实现Hough变换可以借助OpenCV库,这是一个提供大量图像处理功能的计算机视觉库。实现步骤包括预处理、初始化Hough空间、投票过程、查找峰值和显示结果。该技术可用于各种图像处理任务,并且可以扩展到检测其他形状。本zip包提供了完整的C++项目代码、头文件、OpenCV库引用、测试图片以及编译指令,能够帮助开发者深入理解并实践Hough变换。

















 3988
3988

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









