









 本文介绍了Harris角点检测原理及其在Python中的应用。Harris角点检测是一种用于图像处理的角点检测方法,由Chris Harris和Mike Stephens在1988年提出。内容包括检测原理的数学表达式、泰勒级数展开、特征值分析以及在OpenCV中的实现,通过cornerHarris()函数检测角点,并展示了应用示例。
本文介绍了Harris角点检测原理及其在Python中的应用。Harris角点检测是一种用于图像处理的角点检测方法,由Chris Harris和Mike Stephens在1988年提出。内容包括检测原理的数学表达式、泰勒级数展开、特征值分析以及在OpenCV中的实现,通过cornerHarris()函数检测角点,并展示了应用示例。
- Harris 角点检测原理
- Harris 角点检测在python应用
关于Harris 角点检测,官网参见https://docs.opencv.org/3.4.1/dc/d0d/tutorial_py_features_harris.html
Harris 角点检测原理
Chris_Harris 和 Mike_Stephens 于1988年在《A Combined Corner and Edge Detector》中提出发现角点的方法,就是现在被称为Harris 角点检测方法。
该方法的数学形式为:将窗口向各个方向移动(u,v)然后计算所有差异的总和。
表达式如下

窗口函数w(x,y)可以是正常的矩形窗口,也可以是对每一个像素给予不同权重的高斯窗口。
实现角点检测需要使E(u,v)最大化,也就是说必须使方程右侧的第二项的取值最大。
对上面的等式进行泰勒级数(Taylor Expansion)展开,然后再通过几步数学换算,可以得到下面的等式:

其中:

这里的 Ix 和 Iy是图像在 x 和 y 方向的导数。(使用函数 cv2.Sobel()可以很容易获得)。
然后就是关键部分了。获得上面等式之后,可以对一个等式(见下)进行打分来判定窗口内是否包含角点。
R=det(M)−k(trace(M))2
其中
- det(M) = λ1λ2 。注:det表示矩阵M的行列式
- trace(M) = λ1+λ2 。注:trace,或者tr,表示矩阵M的迹。
- λ1和λ2是M的特征值
关于矩阵的概念det和trace,参见https://baike.baidu.com/item/TR/3776614?fr=aladdin。
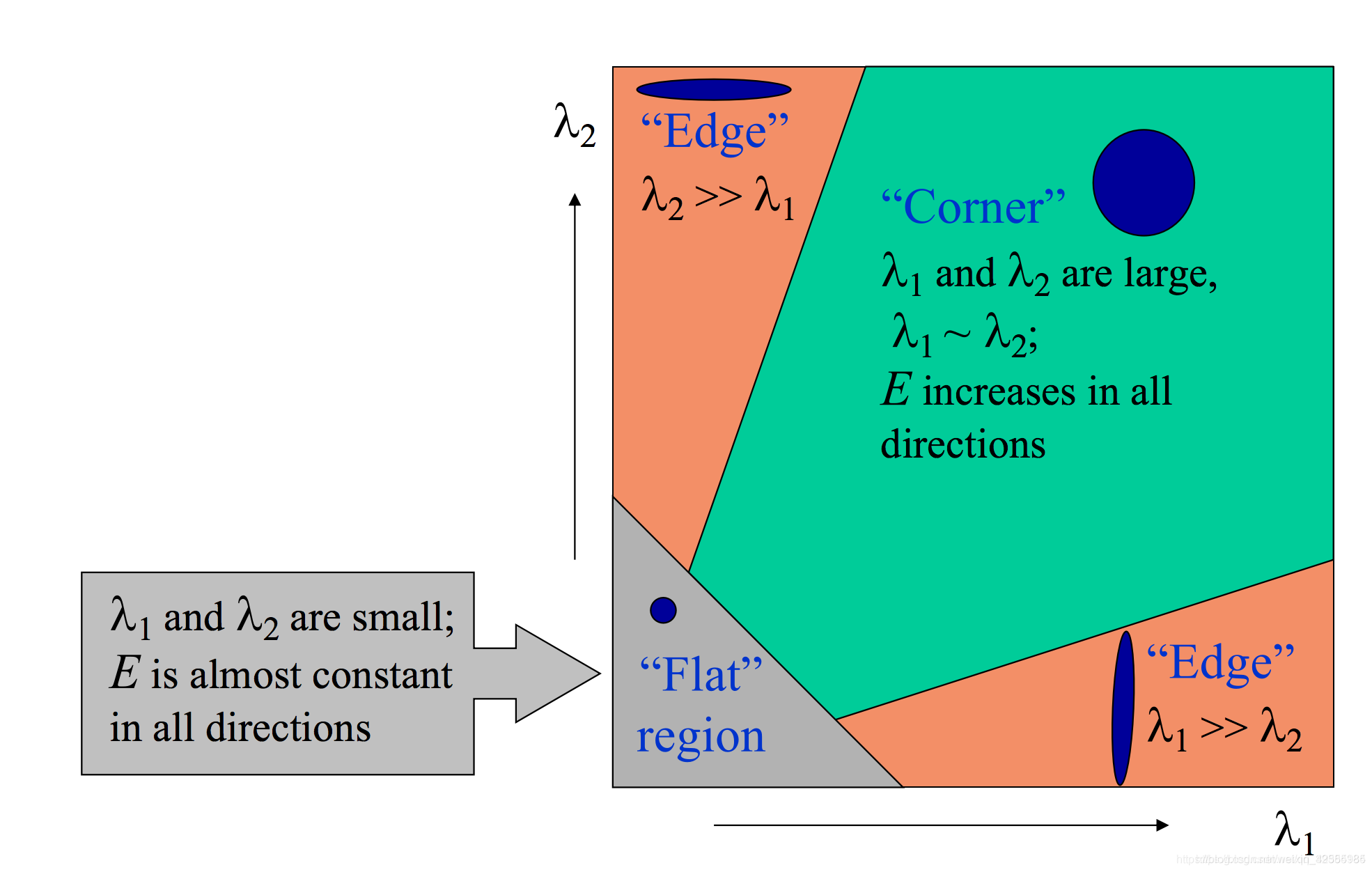
根据这些特征值,我们就可以根据以下条件判断一个区域是否是角点,边界或者是平面。
- 当|R| 很小(此时λ1 和 λ2 都小),这个区域就是一个平面。此时E在所有方向接近于常数。
- 当R < 0(此时λ1远大于λ2,或者λ2远大于λ1),这个区域是边缘。 此时E在某一方向上很大。
- 当R很大(此时λ1 和 λ2 都很大,λ1 近似 λ2 ),这个区域就是角点。此时E在所有方向上都很大。
以上的判定结论图示如下
Harris 角点检测结果就是由这些评分组成的灰度图像。
选取合适的阈值-对图像二值化处理-就可以检测到图像的角点。
Harris 角点检测在python应用
opencv中Harris 角点检测函数是cornerHarris()
dst = cv.cornerHarris( src, blockSize, ksize, k[, dst[, borderType]] )
- src :float32 的灰度图像
- blockSize : 角点检测中要考虑的领域大小,即:窗口函数W(x, y)大小。
- ksize : Sobel 求导中使用的核的大小,可取1,3,5。。。(用sobel函数来得到Ix 和 Iy)
- k : Harris 角点检测方程中的常数。默认在0.04至0.06之间。增大该值,将减小角点响应值,降低角点检测的灵敏性,减少被检测角点的数量;减小该值,将增大角点响应值,增加角点检测的灵敏性,增加被检测角点的数量。
该函数表示,对于每个像素(x,y),计算 blockSize×blockSize 邻域上的2×2梯度协方差矩阵M(x,y)。通过该矩阵,可以根据以下计算获得特征值
dst(x,y)=detM(x,y)−k⋅(trM(x,y))2
还记得上面提到的评分等式吗?R=det(M)−k(trace(M))2,是的,就是它了。
所以,当dst(x,y)局部极大时候,也就是角点位置了。
代码应用如下(参考官网)
import numpy as np
import cv2 as cv
filename = '1.jpg'
img = cv.imread(filename)
gray = cv.cvtColor(img,cv.COLOR_BGR2GRAY) #转化灰度图
gray = np.float32(gray)
dst = cv.cornerHarris(gray,2,3,0.04)
#result is dilated for marking the corners, not important
dst = cv.dilate(dst,None) #形态学运算,膨胀
# Threshold for an optimal value, it may vary depending on the image.
img[dst>0.01*dst.max()]=[0,0,255]
cv.imshow('dst',img)
if cv.waitKey(0) & 0xff == 27:
cv.destroyAllWindows()
原图如下
运行后

红色标注就是角点。

















 2711
2711

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









