



 本文介绍了CAN总线在汽车电子设备中的应用,包括高速CAN和低速CAN的传输速率及其应用场景。CAN总线的特点如多主机工作、优先级判断、抗干扰能力等被详细阐述,还提到了物理层的总线结构和电平状态,以及硬件设备如通信线缆、驱动/接收器和控制器的作用。
本文介绍了CAN总线在汽车电子设备中的应用,包括高速CAN和低速CAN的传输速率及其应用场景。CAN总线的特点如多主机工作、优先级判断、抗干扰能力等被详细阐述,还提到了物理层的总线结构和电平状态,以及硬件设备如通信线缆、驱动/接收器和控制器的作用。

概述
汽车电子设备的不断增多,对汽车上的线束分布以及信息共享与交流提出了更高的要求。传统的电气系统往往采用单一连接的方式通信,这必将带来线束的冗余以及维修的成本的提高。

传统的单一通信的对接方式,已经不能满足现代汽车电子发展的需求,采用更为先进的总线技术势在必行。总线技术可以实现信息的实时共享、解决了传统布线方式中线束多、布线难、成本高等问题,从而提高整车通信的质量与品质。
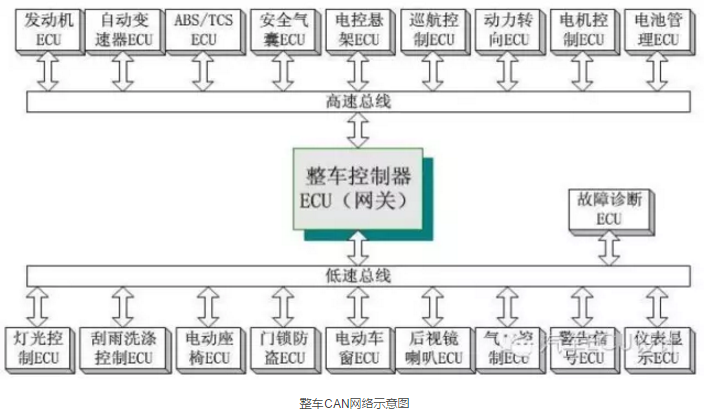
CAN总线(Controller Area Network,控制器局域网络)由德国博世公司于上世纪80年代提出,近20年来,随着CAN总线在工业测控与汽车领域的普及,CAN网络技术不断优化,取得了长足发展。如今CAN总线已经成为了汽车上不可或缺的重要环节,ECU内部的CAN总线开发也占到了ECU开发中的很大分量。在汽车中为了满足车载系统的不同要求,主要采用高速CAN和低速CAN。这两者以不同的总线速率工作以获得最佳的性价比,在两条总线之间采用CAN网关进行连接。
(1)高速CAN(动力总线)
高速CAN总线的传输速率范围在125kbit/s - 1Mbit/s之间,主要用于传动系数传输的实时性要求(如发动机控制、自动变速箱控制、行驶稳定系统、组合仪表等)。
(2)低速CAN(舒适总线)
低速CAN总线的传输速率范围在5kbit/s - 125kbit/s之间。主要用于舒适系统和车身系统的数据传输的实时性要求(如空调控制、座椅调节、车窗升降等)。
CAN总线特点
CAN总线是一种串行数据通讯协议,其中包含了CAN协议的物理层以及数据链路层。可以完成对数据的位填充,数据块编码,循环冗余效验,帧优先级的判别等工作。其主要特点如下:
(1)多主机方式工作,网络上任意一个节点(未脱离总线)均可以随时向总线网络上发布报文帧。
(2)节点发送的报文帧可以分为不同的优先级,满足不同实时要求。
(3)采用载波侦听多路访问/冲突检测(CSMA/CD)技术,当两个节点同时发布信息时,高优先级报文可不受影响地传输数据。
(4)节点总数实际可达110个。
(5)采用短帧结构,每一帧最多有8个有效字节。
(6)当某个节点错误严重时,具有自动关闭功能,切断与总线的联系,致使总线上的其他操作不受影响。
CAN总线物理层
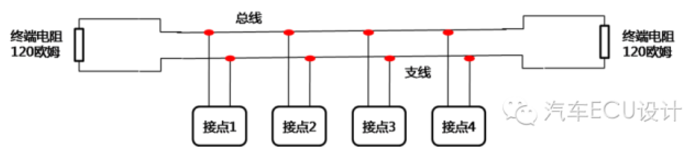
(1)总线结构
CAN总线采用双线传输,两根导线分别作为CAN_H、CAN_L,并在终端配备有120Ω的电阻。收到总线信号时,CAN收发器将信号电平转化为逻辑状态,即CAN_H与CAN_L电平相减后,得到一个插值电平。各种干扰(如点火系统)在两根导线上的作用相同,相减后得到的插值电平可以滤过这些干扰。
(2)总线电平
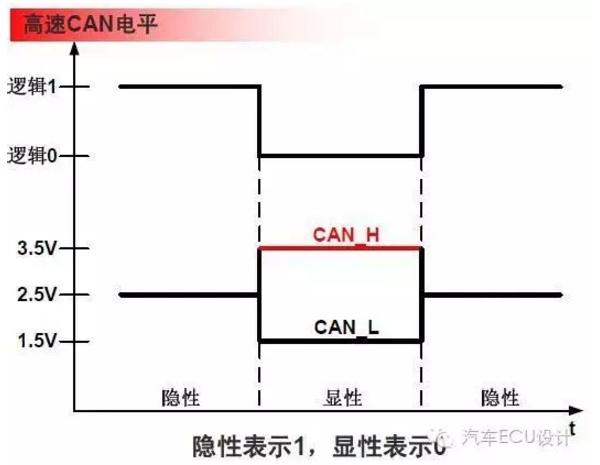
CAN总线有两种逻辑电平状态,即显性与隐性。显性电平代表“0”,隐性电平代表“1”。采用非归零码编码,即在两个相同电平之间并不强制插入一个零状态电平。
高速CAN在传输隐性位时,CAN_H与CAN_L上的电平位均为2.5V;在传输显性位时分别为3.5V与1.5V。
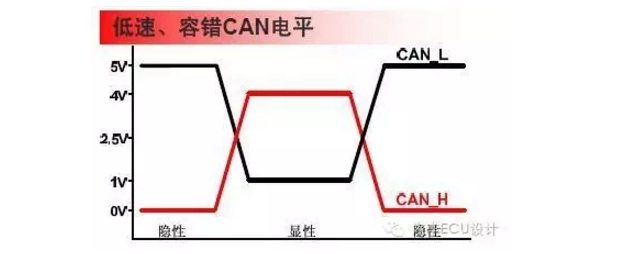
低速CAN在传输隐性状态位时,CAN_H上的电平为0V,CAN_L上的电平位5V。在传输显性状态位时,CAN_H上的电平位3.6V,CAN_L的位1.4V。
为了确保通讯的正确性,总线信号必须在一定时间内出现在总线上,并且保证被正确采样。总线信号传输有一定的时间延迟,最大的可靠的总线波特率与总线长度有关。ISO11898中对各种总线长度有着以下定义:
★ 1Mbit/s 总线长度为40m(规范)。
★ 500kbit/s 总线长度最大值为100m(建议值)。
★ 250kbit/s 总线长度最大值为250m。
★ 125kbit/s 总线长度最大值为500m。
★ 40kbit/s 总线长度最大值为1000m。
CAN总线硬件设备
(1)CAN通信线缆,实现节点的互联,是传输数据的通道。主要有:普通双绞线,同轴电缆,光纤。
(2)CAN驱动/接收器,将信息封装为帧后发送,接收到的帧将其还原为信息、标定并报告节点状态。
(3)CAN控制器,专按协议要求设计制造,经简单总线连接即可实现CAN的全部功能。包括:SJA1000(Philips),82527(Intel)。
(4)CAN微控制器,嵌有部分或全部CAN控制模块及相关接口的通用型微控制器现如今很多芯片都配备CAN接口。
CAN总线基础(下)
ps:因为文章是从公众号转过来的,所以图片有些不清晰,请见谅~

关注公众号:汽车ECU设计
一个菜鸟汽车程序猿的成长之路~



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









